
Мехатрониката е дисциплина, която смесва механиката с електрониката, като е мултидисциплинарен клон на инженерството, който се основава на роботиката, електрониката, изчислителната техника, телекомуникациите, управлението и т.н. За да надхвърлите електронните проекти за „направи си сам“ и да започнете да експериментирате с мехатронни проекти, можете да започнете да интегрирате устройства като двигателите о ел линеен задвижващ механизъм за вашия Arduino.
Това ви отваря нов свят на възможности за производители. Всъщност този линеен задвижващ механизъм е най-практичен със способността да извършва мобилни действия или да упражнява сила върху други елементи. Искате ли да знаете повече? Ние ви казваме ...
Видове линейни изпълнителни механизми

Има няколко вида задвижващи механизми, въпреки че в тази статия ще се спрем на този, който използва електрически мотор за задвижване на буталото. Но трябва да знаете, че може да има и други видове:
- Хидравлика: Те използват някакъв вид течност за придвижване на буталото. Пример може да бъде този на много селскостопански машини или багери, като се използват тези бутала и налягането на маслото за преместване на шарнирните рамена, хидравлични преси и т.н.
- електрически: те са задвижващи механизми, които използват безкраен винт, движен от електрически мотор, за да генерират движението. Съществуват и соленоиден тип (електромагнит), които използват магнитно поле за преместване на буталото или буталото и пружина, за да го върнат в първоначалното си положение, когато това поле не се упражнява. Практически пример може да бъде последният пример, който представям в тази статия, или също много други за роботиката, често срещаните механични устройства и т.н.
- Гуми: те използват въздух като течност, вместо течност, както при хидравликата. Пример за това са типичните линейни изпълнителни механизми, намерени в технологичните работилници на някои образователни центрове.
Крайната цел на това устройство е трансформира енергия хидравлична, електрическа или пневматична в линейна тяга в този случай, като по този начин упражнява сила, тяга, действа като регулатор, активирайки някакъв друг механизъм и т.н.
Относно електронния линеен задвижващ механизъм
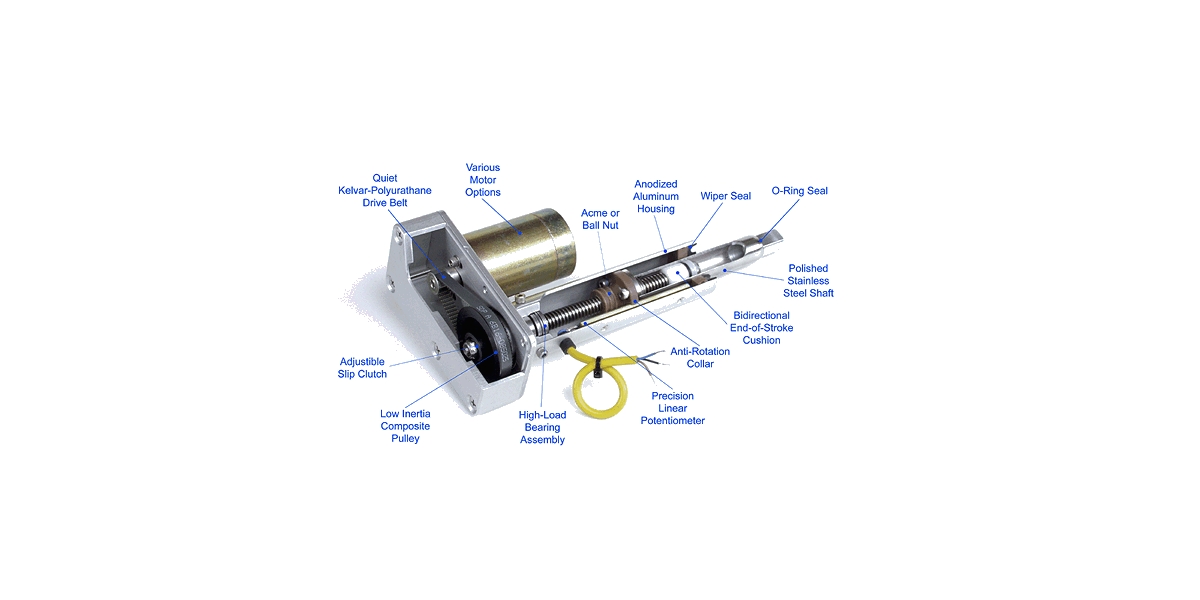
По принцип а електрически линеен задвижващ механизъм понякога не е нищо повече от електрически мотор може да бъде NEMA както вече се видя. Този мотор завърта своя вал и чрез комбинация от зъбни колела или зъбни вериги ще завърти безкраен винт. Този безкраен винт ще отговаря за плъзгането на бутало или прът в една или друга посока (в зависимост от посоката на въртене).
че бутало той ще бъде този, който служи като задвижващ механизъм, за да избута нещо, да издърпа нещо, да упражни сила и т.н. Приложенията са доста широки. Както можете да видите, това е нещо съвсем просто, което не съдържа твърде много загадки.
Тези линейни изпълнителни механизми, за разлика от други нелинейни, имат предимството да могат да упражняват сила големи сили и измествания значителни (в зависимост от модела). Но за Arduino имате някои модели, които могат да достигнат от 20 до 150 Kgf (килограмова сила или килопонд) и измествания от 100 до 180 mm.
Като голям недостатък е неговият скорост на изместванеЗащото при упражняване на тези огромни сили редукционните колела, необходими за увеличаване на въртящия момент, ще доведат до по-ниска скорост на удължаване и прибиране. Скорости от 4 до 20 mm / s могат да бъдат дадени на типичните модели. Това означава, че за да завърши целия линеен процес, той може да премине от няколко десетки секунди до няколко минути, в случай че е по-дълъг и по-бавен ...
Що се отнася до неговото хранене, имате ги с различни напрежения или напрежения. Например, обичайното е, че те са 12 или 24v, въпреки че можете да намерите някои по-долу и над това. Що се отнася до тяхната консумация, те могат да варират от 2А до 5А в някои случаи. Както можете да видите, като мощен двигател, разходът е голям ... Така че, ако планирате да го захранвате с батерии, трябва да имате предвид, че те имат необходимия капацитет.
Линейно управление на задвижващия механизъм
Електрическият линеен задвижващ механизъм, който можете да намерите за Arduino, може да има различни видове контрол на:
- С потенциометър: с помощта на потенциометър те позволяват да се избере положението на буталото.
- С края на кариерата: ограничител на всеки край ще го накара да спре сам, след като достигне върха.
- Извън контрол: те нямат нито една от горните системи за контрол.
pinout
El щипка на линеен задвижващ механизъм не може да бъде по-просто. Той има два проводящи кабела за захранване на електрическия мотор, който е интегриран, и нищо повече от това. Следователно, нула усложнения. Единственото нещо, което трябва да имате предвид за удължаване или прибиране на стеблото, е, че въртенето на двигателя трябва да бъде обърнато (текущата полярност).
За да е възможно това можете използвайте контролер H-bridge като този, използван за двигатели с постоянен ток. Може да си помислите, че някой като него ви обслужва L298NЗа otros като TB6612FNG и др. Но истината е, че никой от тях няма достатъчно мощност за тези линейни задвижващи механизми (ако са големи). Следователно контролерът ще изгори.
Следователно можете да изграждате само собствен контрол на скоростта използване на транзистори като BJT или MOSFET и дори релета в твърдо състояние ...
Къде да купя линеен задвижващ механизъм?
El Precio на линейния изпълнителен механизъм до голяма степен ще зависи от размера, скоростта, дължината, а също и от силата, която той може да издържи. Обикновено можете да ги намерите от около 20 до 200 евро. И лесно ще ги намерите в специализирани магазини за електроника или други онлайн магазини като Amazon. Например:
- Соленоиден задвижващ механизъм на Sourcingmap, способен да упражнява сила от 400g и 4 mm
- Justech DC 12V линеен задвижващ механизъм до 72 кг и ход 150 мм
- LHQ-HQ DC 12v с капацитет за 80 кг и 50 мм ход
- Крайбрежие 12V до 300 мм и 150 кг поддържано тегло (изчислено за 50 мм)
- Няма намерени продукти
Много от тези продукти са защитени срещу прах и пръски от сертификата IPX54. И имайте предвид препоръките на производителя, посочените тегла не винаги се поддържат за всички дължини на удължение, в някои случаи се поддържа само определено пределно тегло до определено удължение.
Интеграция с Arduino
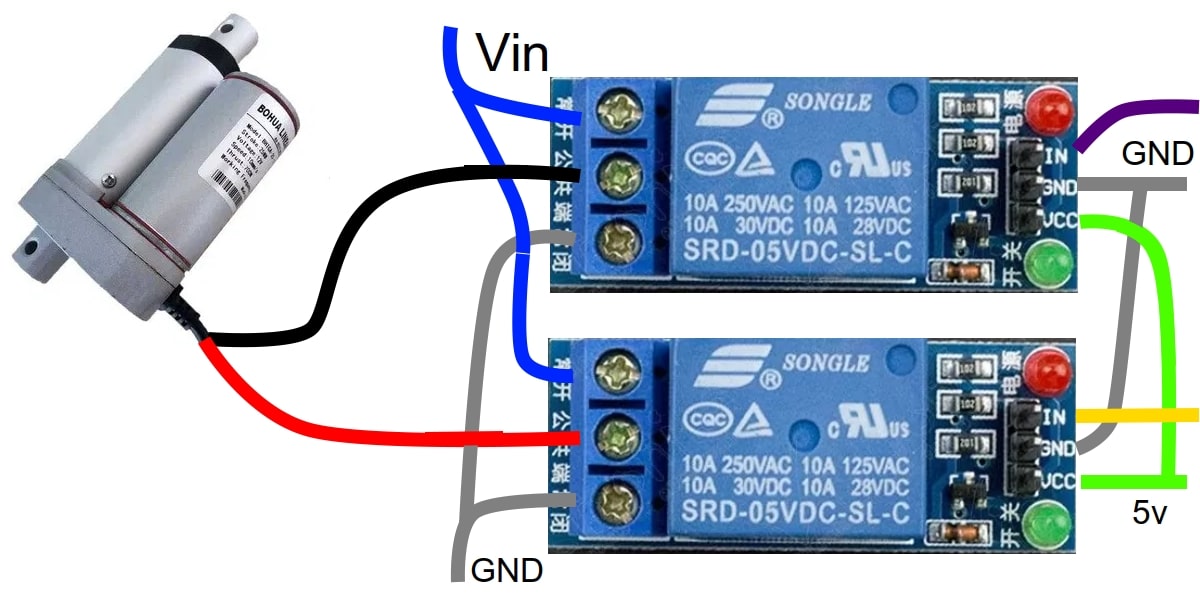
Тези типове задвижвания могат да имат различни практически приложения, ако ги интегрирате с вашата платка Arduino. За да направите това, първото нещо, което трябва да знаете, е начинът, по който можете направете схемата на свързване със значката си. Както можете да видите, това изобщо не е сложно, така че не представлява твърде много усложнения.
Както можете да видите от горната схема, която съм нарисувал, използвал съм две релета и линеен задвижващ механизъм. The цветни линии виждате, че представлява следното:
- Червено и черно: са кабелите на линейния задвижващ механизъм, които ще преминат към всяко от използваните релета.
- Сив: свързали сте към земя или GND във всяко от релетата, както виждате.
- Azul: отива към захранването Vin за релето, в този случай ще бъде между 5v и 12v.
- Зелен: Vcc линиите на модула са свързани към 5v на вашата платка Arduino.
- Сив: също заземен, свързан от модула към Arduino GND.
- Лилаво и оранжево: са контролните линии, които ще преминат към някой от пиновете на Arduino, за да контролират завъртането. Например можете да преминете към D8 и D9.
По отношение на примера на изходен код за вашата Arduino IDE, скицата за основния контрол ще бъде както следва:
//configurar las salidas digitales
const int rele1 = 8;
const int rele2 = 9;
void setup()
{
pinMode(rele1, OUTPUT);
pinMode(rele2, OUTPUT);
//Poner los relés a bajo
digitalWrite(rele1, LOW);
digitalWrite(rele2, LOW);
}
void loop()
{
extendActuator();
delay(2000);
retractActuator();
delay(2000);
stopActuator();
delay(2000);
}
//Activar uno de los relés para extender el actuador
void extendActuator()
{
digitalWrite(rele2, LOW);
delay(250);
digitalWrite(rele1, HIGH);
}
//Lo inverso a lo anterior para retraer el émbolo
void retractActuator()
{
digitalWrite(rele1, LOW);
delay(250);
digitalWrite(rele2, HIGH);
}
//Poner ambos releś apagados parar el actuador
void stopActuator()
{
digitalWrite(rele1, LOW);
digitalWrite(rele2, LOW);
}
Ви промяна на кода за да можете да контролирате и позиционирате буталото в определени позиции, ако желаете, или да добавите още елементи ...