
La mecatrònica és una disciplina que barreja mecànica amb electrònica, sent una branca multidisciplicar de l'enginyeria que es nodreix de la robòtica, l'electrònica, la informàtica, telecomunicacions, control, etc. Per anar més enllà dels projectes DIY electrònics, i començar a experimentar amb projectes mecatrònics, pots començar a integrar dispositius com els motors o el actuador lineal per a la teva Arduino.
Això t'obre un nou món de possibilitats per als makers. De fet, aquest actuador lineal resulta d'allò més pràctic amb la capacitat de realitzar accions mòbils o exercir força sobre altres elements. Vols conèixer més? T'ho expliquem ...
Tipus d'actuadors lineals

Hi ha diversos tipus d'actuadors, encara que en aquest article ens centrarem en el que utilitza un motor elèctric per impulsar l'èmbol. Però has de saber que pot haver-los també d'altres tipus:
- hidràulics: Fan servir algun tipus de fluid per moure el émbolo.Un exemple pot ser el de moltes màquines agrícoles o excavadores, usant aquests pistons i la pressió de l'oli per moure els braços articulats, premses hidràuliques, etc.
- elèctrics: Són actuadors que fan servir un cargol sense fi mogut per un motor elèctric per generar el moviment. També n'hi ha de tipus solenoide (electroimant), que usen camp magnètic per moure el pistó o èmbol i un moll per tornar-lo a la seva posició original quan no s'està exercint aquest camp. Un exemple pràctic pot ser l'exemple final que exposo en aquest article, o també molts altres de robòtica, aparells mecànics comuns, etc.
- Pneumàtics: Fan servir aire com a fluid, en comptes d'un líquid com en el cas dels hidràulics. Un exemple d'aquests són els típics actuadors lineals que hi ha als tallers de tecnologia d'alguns centres educatius.
L'objectiu final d'aquest dispositiu és transformar una energia de tipus hidràulic, elèctric o pneumàtic en una empenta lineal en aquest cas, exercint així força, empenta, actuant com a regulador, accionant algun altre mecanisme, etc.
Sobre l'actuador lineal electrònic
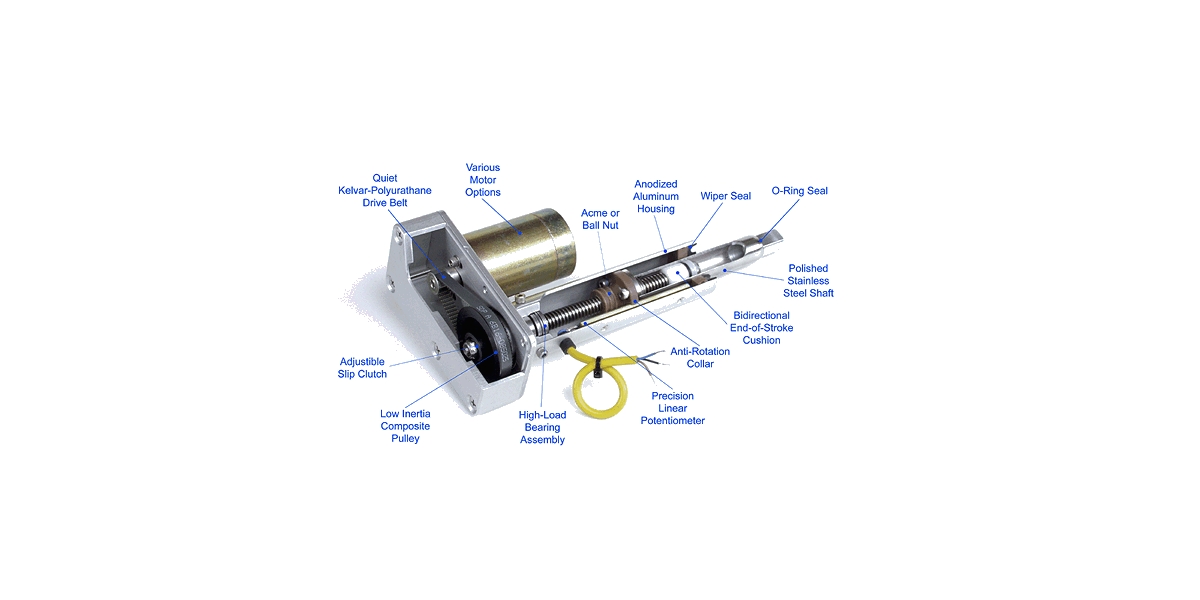
bàsicament un actuador lineal elèctric no és més que un motor elèctric, en ocasions pot ser un NEMA com els ja vistos. Aquest motor fa girar el seu eix, i mitjançant una combinació d'engranatges o cadenes dentades farà girar un cargol sense fi. Aquest cargol sense fi serà l'encarregat de lliscar en una o altra direcció (segons el sentit de gir) un èmbol o plançó.
Aquest èmbol serà el que serveixi com actuador per empènyer alguna cosa, per tirar d'alguna cosa, per exercir una força, etc. Les aplicacions són bastant àmplies. Com veus, és una cosa bastant senzill que no guarda massa misteris.
Aquests actuadors lineals, a diferència d'altres no lineals, tenen l'avantatge de poder exercir grans forces i desplaçaments considerables (en funció de el model). Però per Arduino, tens alguns models que poden arribar des dels 20 als 150 Kgf (quilogram força o quilopond), i desplaçaments de 100 a 180 mm.
Com a gran desavantatge està la seva velocitat de desplaçament, Ja que a l'exercir aquestes enormes forces, les rodes reductores necessàries per augmentar el parell faran que la velocitat d'extensió i per retreure sigui més baixa. Es poden donar velocitats de 4 a 20 mm / s en els models típics. Això fa que per completar tot el procés lineal pugui anar des d'unes desenes de segons a uns minuts en cas de ser més llargs i lents ...
Quant a la seva alimentació, Els tens de diversos voltatges o tensions. Per exemple, l'habitual és que siguin de 12 o de 24v, encara que pots trobar alguns per sota i per sobre d'això. Quant al seu consum, poden anar des dels 2A als 5A en alguns casos. Com veus, a l'tractar-se d'un motor potent, el consum és elevat ... Així que si ho penses alimentar amb bateries, Hauràs considerar que tinguin la capacitat necessària.
Control de l'actuador lineal
L'actuador lineal elèctric que pots trobar per Arduino podria tenir diversos tipus de control:
- amb potenciòmetre: Mitjançant un potenciòmetre permeten seleccionar el posicionament de l'èmbol.
- Amb fi de carrera: Un final de carrera en cada extrem farà que un cop arriba a el límit s'aturi ell sol.
- Sense control: no tenen cap dels anteriors sistemes de control.
Pintura
El pinout d'un actuador lineal no podria ser més senzill. Té dos cables conductors per alimentar el motor elèctric que integra, i res més que això. Per tant, zero complicacions. L'única cosa que cal tenir en compte per estendre o desplega el plançó és que cal invertir el gir de l'motor (polaritat del corrent).
Perquè això sigui possible pots utilitzar un controlador H-bridge com el que es fa servir per als motors de corrent continu. Podries pensar que et serveix algun com el L298N, u altres vistos, com el TB6612FNG, etc. Però la veritat és que cap d'ells té potència suficient per a aquests actuadors lineals (si són de grans dimensions). Per tant, el controlador es cremaria.
Per tant, només pots construir el teu propi control de velocitat usant transistors com els BJT o els MOSFET, i fins i tot relès d'estat sòlid ...
On comprar un actuador lineal?
El preu de l'actuador lineal dependrà en gran mesura de la mida, la velocitat, la longitud, i també de la força que pugui arribar a suportar. En general, pots trobar-los des d'uns 20 € fins a 200 €. I els trobaràs fàcilment en botigues especialitzades d'electrònica o en altres en línia com Amazon. Per exemple:
- Sourcingmap actuador amb solenoide capaç d'exercir una força de 400g i 4 mm
- Justech DC 12V actuador lineal de fins a 72kg i 150 mm de desplaçament
- LHQ-HQ DC 12v amb capacitat per a 80 kg i 50mm de recorregut
- Seafront 12V de fins a 300 mm i 150 kg de pes suportat (estimat per 50mm)
- No s'ha trobat cap producte.
Molts d'aquests productes estan protegits contra pols i esquitxades pel certificat IPX54. I tingues en compte les recomanacions de fabricant, els pesos indicats no sempre estan suportats per a totes les longituds d'extensió, en alguns casos només es suporta cert pes límit fins a certa extensió.
Integració amb Arduino
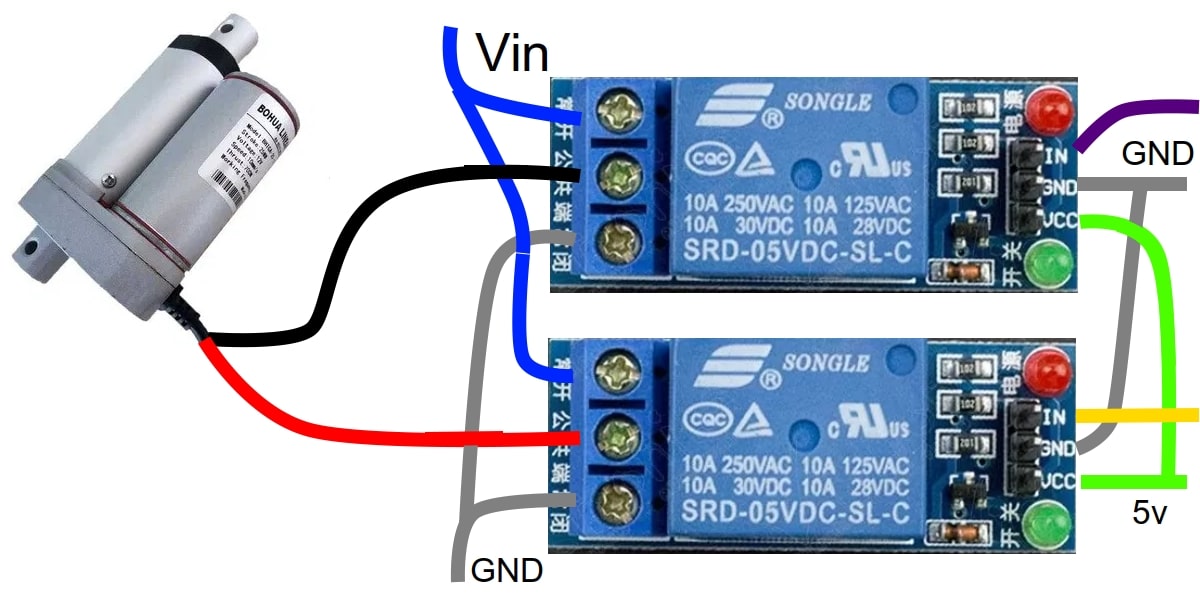
Aquest tipus d'actuadors poden tenir usos pràctics variats si els íntegres amb la teva placa Arduino. Per a això, el primer que has de conèixer és la forma en la qual es pot realitzar l'esquema de connexió amb la teva placa. Com podràs comprovar, no és gens complicat, per la qual cosa no presenta massa complicació.
Com pots veure en l'esquema anterior que he dibuixat, he fet servir dos relés i un actuador lineal. les línies de colors que veus representen el següent:
- Vermell i negre: Són els cables de l'actuador lineal que aniran a cada un dels relés usats.
- gris: Tens connectat a terra o GND en cada un dels relés com pots veure.
- blau: Va a l'alimentació Vin per al relé, en en aquest cas serà d'entre 5v i 12v.
- Verd: Les línies Vcc de la lliçó van connectades a 5v del teu placa Arduino.
- gris: També de terra, connectats des del mòdul a l'GND d'Arduino.
- Morat i taronja: Són les línies de control que aniran a algun dels pins d'Arduino per controlar el gir. Per exemple, pot anar a D8 i D9.
Pel que fa a l'exemple de codi font per al teu Arduino IDE, El sketch per al control bàsic quedaria de la següent forma:
//configurar las salidas digitales
const int rele1 = 8;
const int rele2 = 9;
void setup()
{
pinMode(rele1, OUTPUT);
pinMode(rele2, OUTPUT);
//Poner los relés a bajo
digitalWrite(rele1, LOW);
digitalWrite(rele2, LOW);
}
void loop()
{
extendActuator();
delay(2000);
retractActuator();
delay(2000);
stopActuator();
delay(2000);
}
//Activar uno de los relés para extender el actuador
void extendActuator()
{
digitalWrite(rele2, LOW);
delay(250);
digitalWrite(rele1, HIGH);
}
//Lo inverso a lo anterior para retraer el émbolo
void retractActuator()
{
digitalWrite(rele1, LOW);
delay(250);
digitalWrite(rele2, HIGH);
}
//Poner ambos releś apagados parar el actuador
void stopActuator()
{
digitalWrite(rele1, LOW);
digitalWrite(rele2, LOW);
}
Pots modificar el codi per poder controlar i posicionar l'èmbol en posicions concretes si ho desitja, o afegir més elements ...