
Mechatronik ist eine Disziplin, die Mechanik mit Elektronik mischt. Sie ist ein multidisziplinärer Ingenieurzweig, der sich auf Robotik, Elektronik, Computer, Telekommunikation, Steuerung usw. stützt. Um über elektronische DIY-Projekte hinauszugehen und mit mechatronischen Projekten zu experimentieren, können Sie Geräte wie integrieren die Motoren oder Linearantrieb für dein Arduino.
Das öffnet dich eine neue Welt der Möglichkeiten für Macher. Tatsächlich ist dieser Linearantrieb der praktischste mit der Fähigkeit, mobile Aktionen auszuführen oder Kraft auf andere Elemente auszuüben. Möchten Sie mehr wissen? Wir sagen dir ...
Arten von Linearantrieben

Es gibt verschiedene Arten von Aktuatoren, obwohl wir uns in diesem Artikel auf den konzentrieren, der einen Elektromotor zum Antreiben des Kolbens verwendet. Sie sollten jedoch wissen, dass es auch andere Typen geben kann:
- Hydraulik: Sie verwenden irgendeine Art von Flüssigkeit, um den Kolben zu bewegen. Ein Beispiel kann das vieler landwirtschaftlicher Maschinen oder Bagger sein, die diese Kolben und den Öldruck verwenden, um die Gelenkarme, Hydraulikpressen usw. zu bewegen.
- Elektrisch: Sie sind Aktuatoren, die eine endlose Schraube verwenden, die von einem Elektromotor bewegt wird, um die Bewegung zu erzeugen. Es gibt auch Magnetspulen (Elektromagneten), die ein Magnetfeld verwenden, um den Kolben oder Kolben zu bewegen, und eine Feder, um ihn in seine ursprüngliche Position zurückzubringen, wenn dieses Feld nicht ausgeübt wird. Ein praktisches Beispiel kann das letzte Beispiel sein, das ich in diesem Artikel präsentiere, oder auch viele andere Beispiele für Robotik, gängige mechanische Geräte usw.
- Reifen: Sie verwenden Luft als Flüssigkeit anstelle einer Flüssigkeit wie bei der Hydraulik. Ein Beispiel hierfür sind die typischen Linearantriebe, die in den Technologie-Workshops einiger Bildungszentren zu finden sind.
Das ultimative Ziel dieses Geräts ist eine Energie umwandeln hydraulisch, elektrisch oder pneumatisch in einem linearen Schub in diesem Fall, wodurch Kraft, Schub ausgeübt werden, als Regler fungieren, ein anderer Mechanismus aktiviert wird usw.
Über elektronischen Linearantrieb
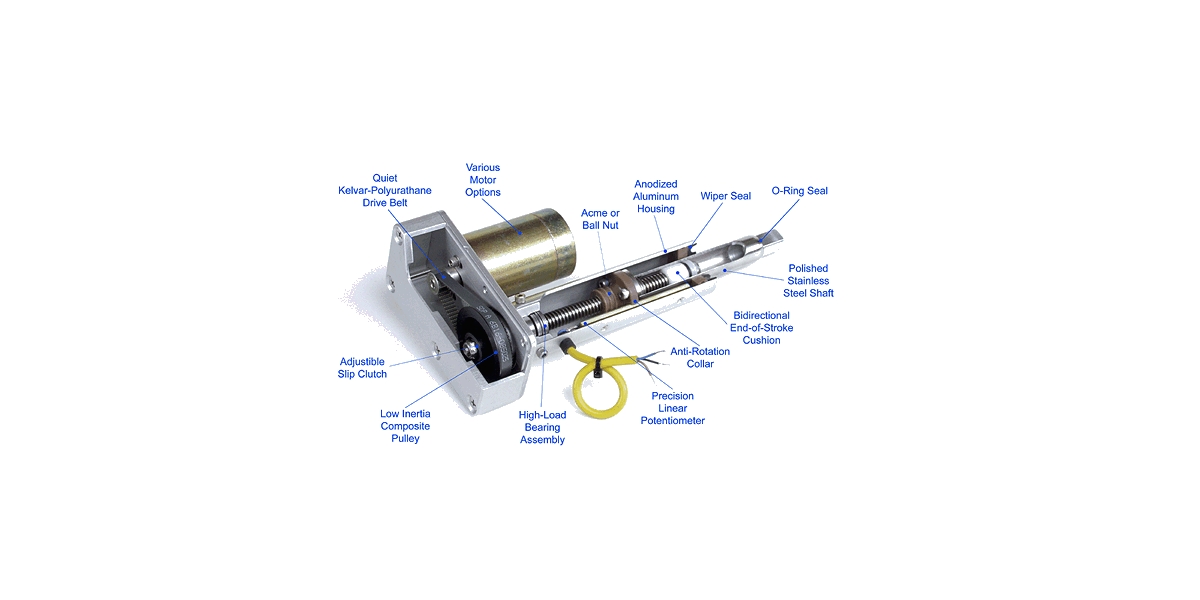
Grundsätzlich a elektrischer Linearantrieb Manchmal ist es nichts weiter als ein Elektromotor kann eine NEMA sein wie schon gesehen. Dieser Motor dreht seine Welle und dreht mittels einer Kombination von Zahnrädern oder Zahnketten eine Endlosschraube. Diese Endlosschraube ist dafür verantwortlich, einen Kolben oder eine Stange in die eine oder andere Richtung zu schieben (abhängig von der Drehrichtung).
Dass Kolben Es wird derjenige sein, der als Aktuator dient, um etwas zu drücken, etwas zu ziehen, eine Kraft auszuüben usw. Die Anwendungen sind ziemlich breit. Wie Sie sehen können, ist es etwas ganz Einfaches, das nicht zu viele Geheimnisse birgt.
Diese Linearantriebe haben im Gegensatz zu anderen nichtlinearen den Vorteil, dass sie in der Lage sind, sich auszuüben große Kräfte und Verschiebungen beträchtlich (je nach Modell). Für Arduino gibt es jedoch einige Modelle, die zwischen 20 und 150 kgf (Kilogramm Kraft oder Kilopond) und Verschiebungen zwischen 100 und 180 mm liegen können.
Als großer Nachteil ist seine Geschwindigkeit der VerschiebungDenn wenn diese enormen Kräfte ausgeübt werden, bewirken die zur Erhöhung des Drehmoments erforderlichen Untersetzungsräder, dass die Ausfahrgeschwindigkeit und das Einfahren geringer sind. Bei typischen Modellen können Geschwindigkeiten von 4 bis 20 mm / s angegeben werden. Dies bedeutet, dass der gesamte lineare Prozess von einigen Dutzend Sekunden bis zu einigen Minuten dauern kann, wenn er länger und langsamer ist ...
Hinsichtlich ihrer ErnährungSie haben verschiedene Spannungen oder Spannungen. Zum Beispiel ist das Übliche, dass sie 12 oder 24 V sind, obwohl Sie einige darunter und darüber finden können. Der Verbrauch kann in einigen Fällen zwischen 2A und 5A liegen. Wie Sie sehen können, ist der Verbrauch als leistungsstarker Motor hoch ... Wenn Sie also vorhaben, ihn zu füttern mit Batterienmüssen Sie berücksichtigen, dass sie die erforderliche Kapazität haben.
Linearaktuatorsteuerung
Der elektrische Linearantrieb, den Sie für Arduino finden können, kann verschiedene Arten von haben Steuerung:
- Mit Potentiometer: Mit einem Potentiometer können sie die Position des Kolbens auswählen.
- Mit Karriereende: Ein Endschalter an jedem Ende lässt es von selbst anhalten, sobald es oben angekommen ist.
- Außer Kontrolle: Sie haben keines der oben genannten Steuerungssysteme.
Pinout
El Pinout eines Linearantriebs könnte nicht einfacher sein. Es hat zwei leitende Kabel, um den Elektromotor zu speisen, den es integriert, und nichts weiter als das. Daher keine Komplikationen. Das einzige, was Sie beim Ausfahren oder Einfahren des Vorbaus beachten müssen, ist, dass die Drehung des Motors umgekehrt werden muss (Strompolarität).
Damit das möglich ist, können Sie Verwenden Sie einen H-Brücken-Controller wie bei Gleichstrommotoren. Sie könnten denken, dass jemand wie er Ihnen dient L298NIn andere gesehen, wie TB6612FNG, etc. Aber die Wahrheit ist, dass keiner von ihnen genug Leistung für diese Linearantriebe hat (wenn sie groß sind). Daher würde der Controller ausbrennen.
Daher können Sie nur bauen Ihre eigene Geschwindigkeitsregelung unter Verwendung von Transistoren wie BJTs oder MOSFETs und sogar Relais fester Zustand ...
Wo kann man einen Linearantrieb kaufen?
El Preis des Linearantriebs hängt weitgehend von der Größe, Geschwindigkeit, Länge und auch der Kraft ab, der er standhalten kann. Sie finden sie normalerweise zwischen 20 und 200 Euro. Und Sie finden sie leicht in spezialisierten Elektronikgeschäften oder anderen Online-Geschäften wie Amazon. Beispielsweise:
- Sourcingmap-Magnetantrieb, der eine Kraft von 400 g und 4 mm ausüben kann
- Justech DC 12V Linearantrieb bis 72 kg und 150 mm Federweg
- LHQ-HQ DC 12V mit einer Kapazität von 80 kg und 50 mm Federweg
- 12 V am Meer bis zu 300 mm und 150 kg unterstütztes Gewicht (geschätzt für 50 mm)
- Keine Produkte gefunden
Viele dieser Produkte sind gegen geschützt Staub und Spritzer durch das IPX54-Zertifikat. Beachten Sie auch die Empfehlungen des Herstellers. Die angegebenen Gewichte werden nicht immer für alle Verlängerungslängen unterstützt. In einigen Fällen wird nur ein bestimmtes Grenzgewicht bis zu einer bestimmten Verlängerung unterstützt.
Integration mit Arduino
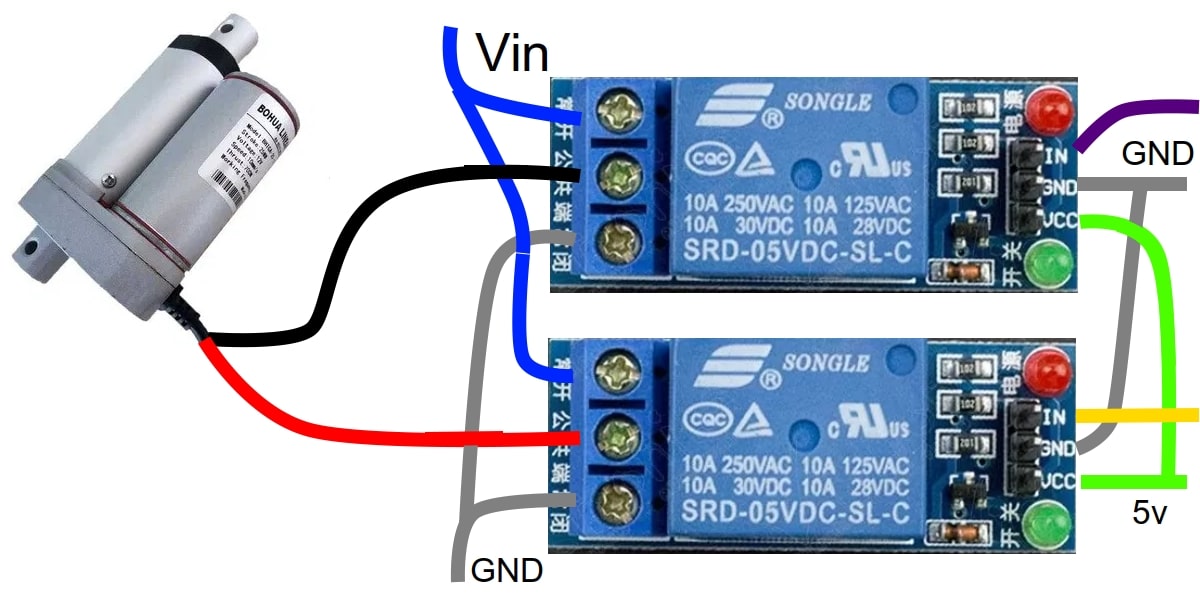
Diese Arten von Aktuatoren können verschiedene praktische Anwendungen haben, wenn Sie sie in Ihr Arduino-Board integrieren. Um dies zu tun, sollten Sie als Erstes wissen, wie Sie es können Machen Sie den Anschlussplan mit deinem Abzeichen. Wie Sie sehen können, ist es überhaupt nicht kompliziert, so dass es nicht zu kompliziert ist.
Wie Sie dem obigen Schema entnehmen können, das ich gezeichnet habe, habe ich zwei Relais und einen Linearantrieb verwendet. Das farbige Linien Sie sehen Folgendes darstellen:
- rot und Schwarz: sind die Kabel des Linearantriebs, die zu jedem der verwendeten Relais führen.
- grau: Sie haben in jedem der Relais eine Verbindung zu Masse oder GND hergestellt, wie Sie sehen können.
- blau: Es geht an die Stromversorgung Vin für das Relais, in diesem Fall liegt es zwischen 5V und 12V.
- grün: Die Vcc-Leitungen des Moduls werden an 5 V Ihrer Arduino-Karte angeschlossen.
- grau: auch Masse, vom Modul mit dem Arduino GND verbunden.
- Lila und Orange: sind die Steuerleitungen, die zu einem der Arduino-Pins führen, um den Spin zu steuern. Sie können beispielsweise zu D8 und D9 wechseln.
In Bezug auf das Beispiel von Quellcode für Ihre Arduino IDEDie Skizze für die Grundsteuerung wäre wie folgt:
//configurar las salidas digitales
const int rele1 = 8;
const int rele2 = 9;
void setup()
{
pinMode(rele1, OUTPUT);
pinMode(rele2, OUTPUT);
//Poner los relés a bajo
digitalWrite(rele1, LOW);
digitalWrite(rele2, LOW);
}
void loop()
{
extendActuator();
delay(2000);
retractActuator();
delay(2000);
stopActuator();
delay(2000);
}
//Activar uno de los relés para extender el actuador
void extendActuator()
{
digitalWrite(rele2, LOW);
delay(250);
digitalWrite(rele1, HIGH);
}
//Lo inverso a lo anterior para retraer el émbolo
void retractActuator()
{
digitalWrite(rele1, LOW);
delay(250);
digitalWrite(rele2, HIGH);
}
//Poner ambos releś apagados parar el actuador
void stopActuator()
{
digitalWrite(rele1, LOW);
digitalWrite(rele2, LOW);
}
Sie Ändern Sie den Code um den Kolben steuern und in bestimmten Positionen positionieren zu können, wenn Sie dies wünschen, oder um weitere Elemente hinzuzufügen ...