Many electronic projects need an element of governance, and that happens by having a gyroscope or gyroscope. This element can also detect movements or turns of the device, and help generate a reaction against this movement. For example, if it is a command, it could rotate in the direction that the user wants to control an element or a video game.
All the applications of a gyroscope, as you can imagine there are many, such as the one integrated by smartphones to be able to know when the screen has been rotated and perform some control action on the operating system, to handle vehicles or video game characters, etc. It is also integrated in some laptops to determine that the equipment has been dropped and thus be able to turn off the hard disk (HDD) in time to prevent the head from hitting the rotating disk and breaking, etc.
They can also be used to guidance systems, to know where a device is going. This serves both for autonomous robots, and other systems that need to be properly oriented without intervention or with user intervention. Drones also have this type of elements installed, and even virtual reality glasses, augmented or mixed reality, to be able to adapt the image that is seen according to the movement of the user ...
Also in the military industry It has had many applications, such as being able to guide the first rockets and missiles that could be oriented to a target in a better way thanks to these gyroscopes. In addition, this, together with modern satellite systems such as GPS, can have very high precision.
As you can see, the applications are many, and surely you, as a maker, have more in your head for your future DIY project ...
A Little History
El sense of orientation it has been necessary for many years, especially with navigation. The first systems were based on a spinning top, like that of the XNUMXth century by the British John Serson. With it he intended to give another use to the spinning top to be able to locate the horizon in the high seas when visibility was reduced or null.
Little by little the orientation devices were evolving until the first gyroscope as such no would go up to 1852, with Foucault's invention. It emerged as the product of an experiment to demonstrate the rotation of the Earth. An element with a pendulum that could show that turn in a simple way.
Little by little, mechanical devices evolved with the proliferation of the aeronautical and military industries for torpedoes and missiles. It is necessary to emphasize in this sense the Sperry Corp gyro, for the military industry and that became one of the first directional and modern concepts.
After that, they would begin to refine, reduce in size, increase in terms of precision until they reach the current systems electronic and miniaturized thanks to technologies such as MEMS. From this we already saw something in the MPU6050 item from this blog.
How does a gyroscope work?
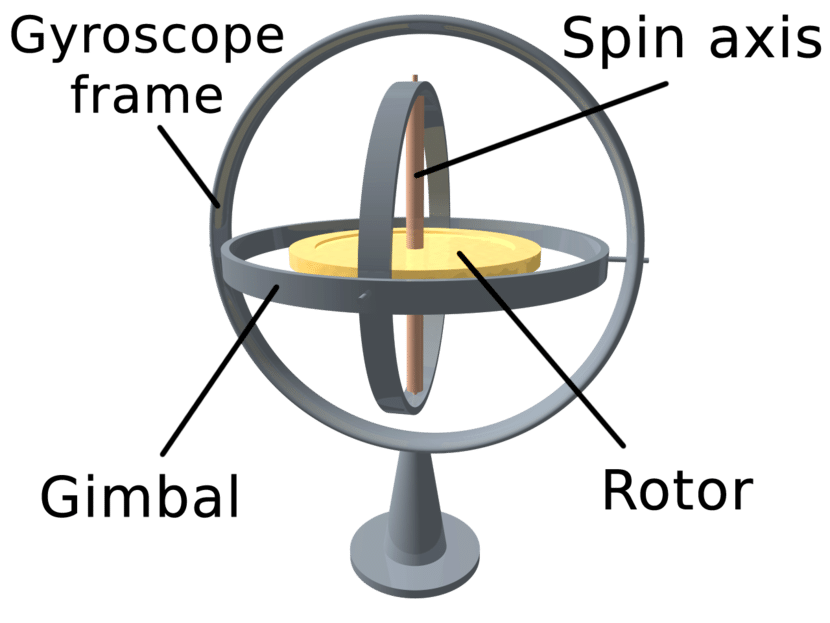
The gyroscope or gyroscope is based on the gyroscope effect. This is a phenomenon that occurs when a device formed by a disk mounted on a horizontal axis, around which the disk rotates freely at high speed. If an observer maintains the axis of the background with the left hand and the axis of the front with the right, when lowering the right hand and raising the left, he will feel a very peculiar behavior.
What the observer will feel is that the gyroscope pushes your right hand and pulls your left hand. This is what is known as the gyroscope effect. I do not know if you have ever held in your hand a mechanical hard disk (HDD) with high rotation speeds (7200 RPM), when it is running, but surely you will notice that it has some inertia when you move it, something like this is what I speak to you here ...
Well, this phenomenon is used by conventional gyroscopes to be able to know when a movement occurs. Although the current embedded microelectronic devices In the technological devices, which are referred to in this article, they are sophisticated elements that capture the angular displacement per unit of time or how fast a body rotates around its axis, using a different effect.
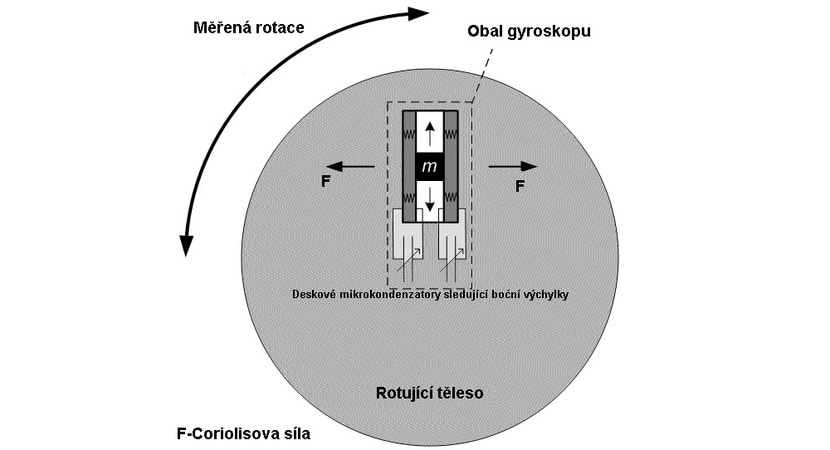
They get very good precisions thanks to the MEMS with a known effect looks like Coriolis. In this case, it was discovered by the Frenchman Gaspard-Gustave Coriolis in 1836. The effect is observed in a rotating reference frame when a body is in motion with respect to said reference frame. It consists of a relative acceleration of the body in said system of rotation. Said acceleration will always be perpendicular to the axis of rotation of the system and to the speed of the body.
The object in this case undergoes an acceleration from the point of view of the rotating observer, as if there were an unreal force on the object that accelerates it. It is a Coriolis force of the inertial or fictitious type, thanks to which it can be measure angular velocity, integrating the angular velocity with respect to time, the angular displacement, or simply knowing if an object has moved ...
Specifically, in a MEMS type sensor, you have a small chip inside which has been implemented a gyroscope with a size ranging from 1 to 100 micrometers, that is, even smaller than a human hair. This device is sufficient so that when it is rotated, a small resonance mass moves with the changes in angular velocity, in turn producing very low current electrical signals that will be read and interpreted by the control circuitry.
Characteristics that you should observe in a gyroscope

Some of the characteristics that you should take into account when it comes to choose a gyro for your project eson:
- Range: maximum angular velocity that it will be able to measure should not exceed the maximum range of the gyroscope you choose. However, you should also have the best possible sensitivity, and this is achieved by making the gyro range not much higher than you need.
- Interface: not too much of a problem, since 95% of the gyroscopes on the market have analog output, although there are some with a digital interface of the SPI type or I2C bus.
- Number of axles: as in accelerometers, it is something very important. They do not usually have as many axes available as in the case of accelerometers, but the more the better. Nowadays some 3-axes have started to appear, which is a very good thing. But most models have 1 or 2 axes, which should be sufficient for most projects. In the 3-axis ones, you should consult the model information to know which axis measures the turn, since the other two can also measure the pitch and roll of an object, while another measure the pitch and yaw.
- Consumer goods: another of the important characteristics, since if your project depends on a battery or cell you must choose one that consumes little energy. Usually not too much, the average consumption is usually around 100 micro amps. Some more advanced ones will have a power suspend function when not in use.
- Extras: some may have some extras, such as accelerometer sensors, temperature meters, etc., in the same module.
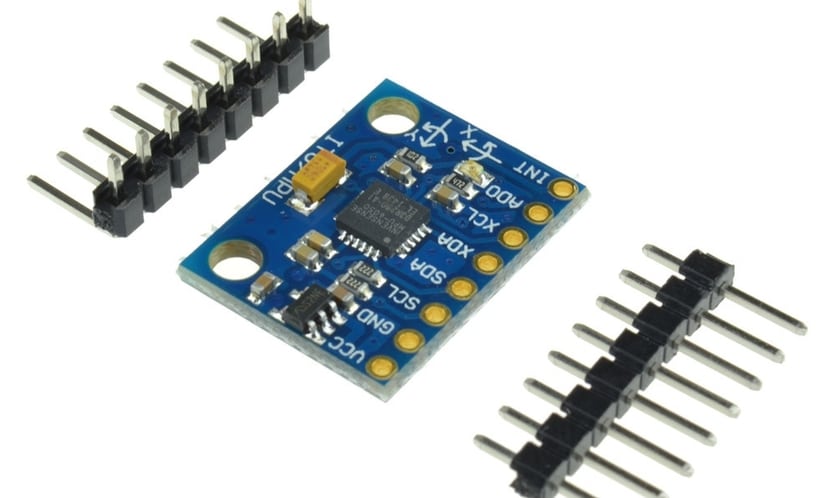
Also, if you buy modulesThey will have the chip and a PCB with some extras that will facilitate their integration with Arduino, for example, providing connection and power pins, etc.
Gyros you can buy
Several gyros you can buy such as MPU6050 which also includes accelerometer. We already described it in another article, but besides that, there are others that you can easily integrate into your electronic projects together with Arduino.
- You can buy a gyro like the ST Microelectronics LPY503AL. It is one of the most popular, and you can read its datasheet here.
- You can also use the inertial sensor as No products found.,No products found. e No products found., in addition to the MPU6050 ...
Its connection and integration with Arduino will depend on each model and manufacturer. But it is not complicated. You can check their datasheets and pinout to know how to manage them. The question is to know how they work to know how to calculate the angular displacement and that your code in Arduino IDE interprets it and generates an action accordingly ...