Lisaks sellele, et saate ise kujundada selle tüki geomeetria, mille soovite omale printida 3D printer tarkvara kasutades on ka teine lihtsam võimalus, millega saab väga täpselt kopeerida olemasolevaid objekte. See on umbes 3D-skanner, mis skannib soovitud objekti pinna ja teisendab selle digitaalsesse vormingusse, et saaksite seda retušeerida või printida sellisel kujul, et teha koopiaid.
Sellest juhendist saate teada, mis need on. parimad 3D-skannerid ja kuidas valida endale sobivaim vastavalt teie vajadustele.




Parimad 3D skannerid
Seal on palju silmapaistvaid kaubamärke, nagu mainekas Saksa Zeiss, Shining 3D, Artec, Polyga, Peel 3D, Phiz 3D Scanner jne, mis muudab valiku veelgi keerulisemaks. Kui kahtlete, millist 3D-skannerit osta, siis siin on mõned neist. parimad mudelid Mida soovitame õige ostu tegemiseks:
Särav 3D EINSCAN-SP

see Valge valguse tehnoloogiaga 3D-skanner on üks parimaid, kui otsite midagi professionaalset. Selle eraldusvõime on kuni 0.05 mm, jäädvustades isegi väikseima detaili. See suudab skaneerida kujundeid alates 30x30x30mm kuni 200x200x200mm (koos plaadimängijaga) ja ka mõnda suuremat 1200x1200x1200mm (kui seda kasutatakse käsitsi või statiiviga). Lisaks on sellel hea skannimiskiirus, võimalus eksportida OBJ, STL, ASC ja PLY, automaatne kalibreerimissüsteem ja USB-pistik. Ühildub Windowsiga.
Särav 3D Uno Can

See maineka kaubamärgi teine mudel on mõnevõrra odavam kui eelmine, kuid see võib olla ka hea valik, kui otsite midagi professionaalseks kasutamiseks. ka kasutada valge värvi tehnoloogia, eraldusvõimega 0.1 mm ja suutlikkus skaneerida kujundeid 30x30x30 mm kuni 200x200x200 mm (plaadimängijal), kuigi saate seda kasutada ka käsitsi või statiivil maksimaalselt 700x700x700 mm suuruste kujundite jaoks. Sellel on hea skannimiskiirus, see ühendub USB kaudu ja see võib töötada OBJ, STL, ASC ja PLY failivormingutega nagu eelmine. Ühildub Windowsiga.
Creality 3D CR-Scan

See teine suurepärane kaubamärk on loonud skanneri 3D-modelleerimiseks väga lihtne kasutada, automaatse reguleerimisega, ilma kalibreerimise või märkide kasutamiseta. See ühendub USB kaudu ja ühildub Windowsi, Androidi ja macOS-iga. Lisaks on sellel kõrge täpsus kuni 0.1 mm ja eraldusvõime 0.5 mm ning see võib oma omaduste ja kvaliteedi tõttu olla ideaalne ka professionaalseks kasutamiseks. Mis puudutab skaneerimise mõõtmeid, siis need on suurte osade skannimiseks üsna suured.
BQ Cyclop

See Hispaania kaubamärgi BQ 3D-skanner on veel üks hea valik, kui otsite midagi isetegemiseks taskukohast. Kiire 0.5 mm täppisskanner kvaliteetse Logitech C270 HD kaameraga, kahe 1. klassi lineaarlaseriga, USB-pistikuga, Nema samm-mootorid, ZUM-draiver, mis on võimeline eksportima G-Code'i ja PLY-sse ning ühildub Linuxi ja Windowsi operatsioonisüsteemidega.
Inncen POP 3D Revopoint

Teine alternatiiv eelmistele. 3D-skanner koos a 0.3 mm täpsus, topeltinfrapunaandurid (silmale ohutu), sügavuskaameratega, kiire skannimine, RGB-kaamera tekstuuri jäädvustamiseks, OBJ, STL ja PLY ekspordi tugi, juhtmega või traadita ühenduse võimalus, 5 erinevat skannimismeetodit režiimis ja ühilduvad Androidi, iOS-i ja macOS-iga ja Windowsi operatsioonisüsteemid.
Mis on 3D-skanner
Un 3D-skanner on seade, mis on võimeline analüüsima objekti või stseeni et saada andmeid kuju, tekstuuri ja mõnikord ka värvi kohta. Seda teavet töödeldakse ja teisendatakse kolmemõõtmelisteks digitaalmudeliteks, mida saab kasutada nende tarkvarast muutmiseks või 3D-printerile printimiseks ja objektist või stseenist täpsete koopiate tegemiseks.
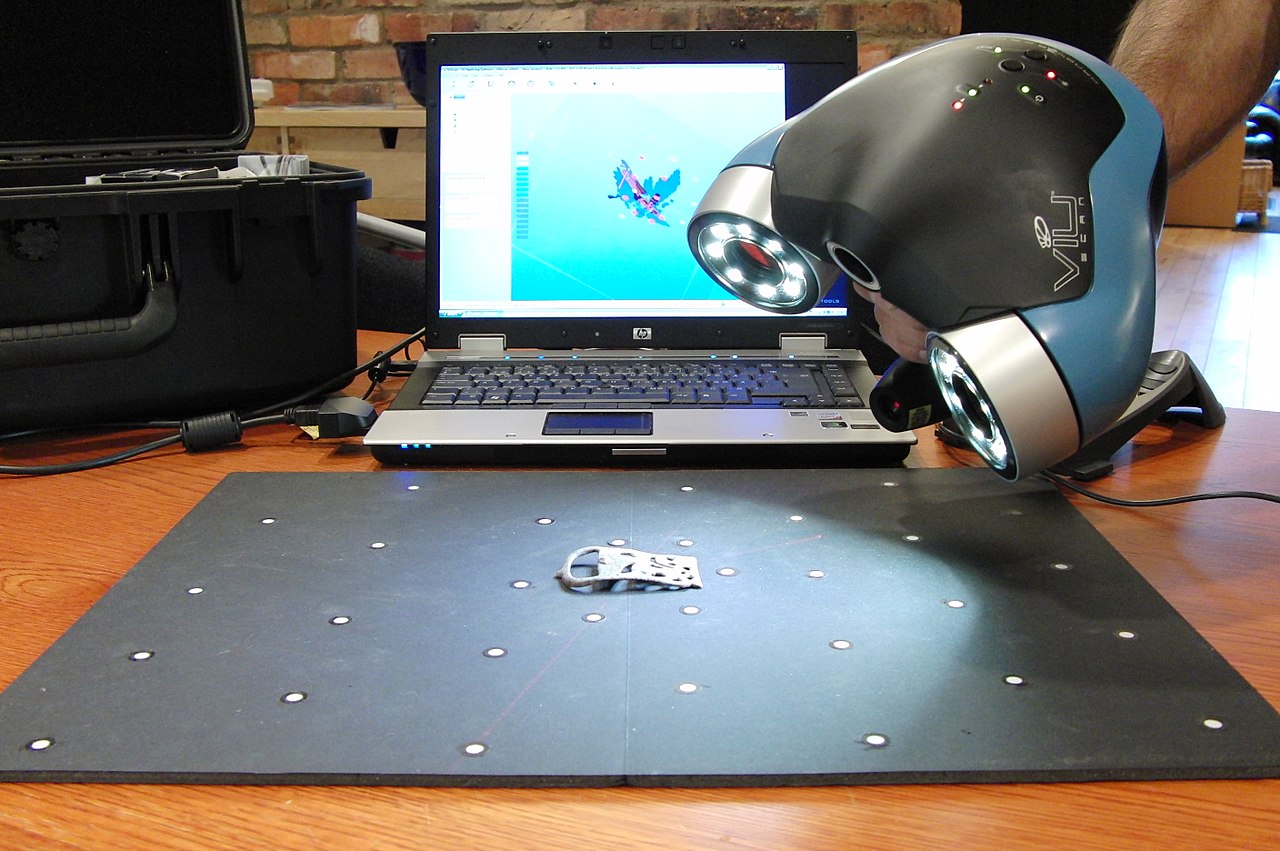
Nende skannerite tööviis on tavaliselt optiline, tekitades objekti pinna ümber võrdluspunktide pilve, et ekstrapoleerida täpset geomeetriat. Seetõttu 3D skannerid erinevad tavalistest kaameratestKuigi neil on koonusekujuline vaateväli, jäädvustavad kaamerad värviteavet vaateväljas olevatelt pindadelt, 3D-skanner aga asukohateavet ja kolmemõõtmelist ruumi.
Mõned skannerid ei anna terviklikku mudelit ühe skannimisega, vaid vajavad mitu võtet, et saada osa erinevatest osadest ja seejärel need tarkvara abil kokku õmmelda. Sellest hoolimata on see siiski a palju täpsem, mugavam ja kiirem variant et saada detaili geomeetria ja saaks hakata seda trükkima.
3D-skanner, kuidas see töötab
3D-skanner töötab üldiselt mõne kiirguse abil, mida kiirgab a valgust, infrapuna- või laserkiirt mis arvutab kiirgava objekti ja objekti vahelise kauguse, märkides kopeeritava osa pinnal kohaliku võrdluspunkti ja punktide seeria koos koordinaatidega. Peeglite süsteemi kaudu pühib see pinda ja hangib erinevad koordinaadid või punktid, et saavutada kolmemõõtmeline koopia.
Sõltuvalt objekti kaugusest, soovitud täpsusest ja objekti suurusest või keerukusest võib teil tekkida vajadus üks võte või rohkem kui üks.
Liigid
Seal on 2 3D-skannerite tüübid põhiline, olenevalt skannimise viisist:
- Võtke ühendust: Seda tüüpi 3D-skannerid peavad toetama objekti pinnale osa, mida nimetatakse jäljendiks (tavaliselt karastatud terasest või safiirist ots). Sel viisil määravad mõned sisemised andurid sondi ruumilise asukoha, et joonis uuesti luua. Neid kasutatakse tööstuses laialdaselt tootmisprotsesside juhtimiseks ja 0.01 mm täpsusega. Kuid see ei ole hea valik õrnade, väärtuslike (nt ajaloolised skulptuurid) või pehmete esemete jaoks, kuna ots või pliiats võib pinda muuta või kahjustada. See tähendab, et see oleks hävitav skaneerimine.
- Pattekontakt: need on kõige levinumad ja hõlpsamini leitavad. Neid nimetatakse nn, kuna need ei vaja kontakti ega kahjusta osa ega muuda seda mingil viisil. Sondi asemel kasutavad nad mõne signaali või kiirguse, näiteks ultraheli, IR-lainete, valguse, röntgenikiirguse jne emissiooni. Need on kõige levinumad ja lihtsamini leitavad. Nende sees on omakorda kaks suurt perekonda:
- Varad: need seadmed analüüsivad objekti kuju ja mõnel juhul ka värvi. Seda tehakse pinna otsese mõõtmisega, polaarkoordinaatide, nurkade ja kauguste mõõtmisega, et koguda kolmemõõtmelist geomeetrilist teavet. Seda kõike tänu sellele, et see genereerib ühendamata punktide pilve, mille mõõtmiseks kiirgab teatud tüüpi elektromagnetilist kiirt (ultraheli, röntgenikiirgus, laser jne) ja mis muundab rekonstrueerimiseks ja eksportimiseks hulknurkadeks. 3D CAD mudel.. Nende hulgast leiate mõned alamtüübid, näiteks:
- Lennuaeg: 3D-skanneri tüüp, mis kasutab lasereid ja mida kasutatakse laialdaselt suurte pindade, näiteks geoloogiliste moodustiste, hoonete jms skaneerimiseks. See põhineb Lahe. Need on vähem täpsed ja odavamad.
- triangulatsioon: kasutab triangulatsiooniks ka laserit, mille kiir tabab objekti, ja kaamerat, mis tuvastab laserpunkti ja kauguse. Need skannerid on suure täpsusega.
- faaside erinevus: mõõdab kiiratava ja vastuvõetud valguse faasierinevust, kasutab seda mõõtmist objekti kauguse hindamiseks. Täpsus on selles mõttes kahe eelmise vahepealne, veidi kõrgem kui ToF ja veidi madalam kui triangulatsioon.
- konoskoopiline holograafia: on interferomeetriline tehnika, mille abil pinnalt peegeldunud kiir läbib kaksikmurduvat kristalli, st kristalli, millel on kaks murdumisnäitajat, üks harilik ja fikseeritud ning teine erakordne, mis on funktsioon kristalli langemisnurgast. kiir kristalli pinnal. Selle tulemusena saadakse kaks paralleelset kiirt, mis pannakse silindrilise läätse abil segama, need häired püütakse kinni tavapärase kaamera anduriga, saades narmaste mustri. Selle häire sagedus määrab objekti kauguse.
- struktureeritud valgus: projitseerida objektile valgusmuster ja analüüsida stseeni geomeetriast põhjustatud mustri deformatsiooni.
- moduleeritud valgus: nad kiirgavad valgust (sellel on tavaliselt sünodaalses vormis amplituuditsüklid), mis objektis pidevalt muutuvad. Kaamera jäädvustab selle kauguse määramiseks.
- Kohustused: seda tüüpi skanner pakub ka kaugusteavet, kasutades selle hõivamiseks kiirgust. Tavaliselt kasutavad nad stseeni poole suunatud eraldi kaamerapaari, et saada kolmemõõtmelist teavet, analüüsides erinevaid jäädvustatud pilte. See analüüsib kaugust iga punktini ja annab 3D moodustamiseks mõned koordinaadid. Sel juhul saab paremaid tulemusi siis, kui on oluline nii skannitava objekti pinnatekstuuri jäädvustamine kui ka odavam. Erinevus aktiivsetest seisneb selles, et mingit tüüpi elektromagnetkiirgust ei kiirgata, vaid need piirduvad lihtsalt keskkonnas juba olemasolevate emissioonide, näiteks objektil peegelduva nähtava valguse, kinni püüdmisega. Samuti on mõned variandid, näiteks:
- stereoskoopiline: nad kasutavad sama põhimõtet nagu fotogrammeetria, määrates pildi iga piksli kauguse. Tavaliselt kasutab ta selleks kahte eraldi videokaamerat, mis on suunatud samale stseenile. Iga kaameraga tehtud pilte analüüsides on võimalik need vahemaad määrata.
- Siluett: kasutage kolmemõõtmelist objekti ümbritsevate fotode järjestikuste põhjal loodud visandeid, et need ristuda, et moodustada objekti visuaalne lähendus. Sellel meetodil on probleem õõnsate objektide puhul, kuna see ei jäädvusta sisemust.
- Pildipõhine modelleerimine: on ka teisi fotogrammeetrial põhinevaid kasutaja abiga meetodeid.
- Varad: need seadmed analüüsivad objekti kuju ja mõnel juhul ka värvi. Seda tehakse pinna otsese mõõtmisega, polaarkoordinaatide, nurkade ja kauguste mõõtmisega, et koguda kolmemõõtmelist geomeetrilist teavet. Seda kõike tänu sellele, et see genereerib ühendamata punktide pilve, mille mõõtmiseks kiirgab teatud tüüpi elektromagnetilist kiirt (ultraheli, röntgenikiirgus, laser jne) ja mis muundab rekonstrueerimiseks ja eksportimiseks hulknurkadeks. 3D CAD mudel.. Nende hulgast leiate mõned alamtüübid, näiteks:
Mobiilne 3D skanner
Paljud kasutajad küsivad sageli, kas saate kasutage nutitelefoni nii, nagu oleks see 3D-skanner. Tõde on see, et uued mobiiltelefonid saavad tänu mõnele rakendusele kasutada oma peamisi kaameraandureid, et jäädvustada 3D-kujusid. Ilmselgelt pole neil sama täpsus ja professionaalsed tulemused kui spetsiaalsel 3D-skanneril, kuid need võivad olla kasulikud isetegemisel.
mõned head rakendused mobiilseadmetele iOS/iPadOS ja Android, mida saate alla laadida ja proovida, on järgmised:
kodune 3d skanner
Samuti küsivad nad sageli, kas saate tehke omatehtud 3D-skanner. Ja tõsi on see, et tegijatele on projekte, mis võivad teid selles osas palju aidata, nt OpenScan. Samuti leiate mõned projektid, mis põhinevad Arduinol ja mida saab printida, et neid ise kokku panna nagu nii, ja võite isegi leida kuidas muuta xbox kinect 3D-skanneriks. Ilmselgelt sobivad need isetegemisprojektideks ja õppimiseks, kuid te ei suuda saavutada samu tulemusi kui professionaalid.
3D-skanneri rakendused
Kuna 3D-skanneri rakendused, saab seda kasutada palju rohkematel eesmärkidel, kui võite ette kujutada:
- tööstuslikud rakendused: Seda saab kasutada kvaliteedi või mõõtmete kontrollimiseks, et näha, kas valmistatud osad vastavad vajalikele tolerantidele.
- Pöördtehnika: need on väga kasulikud objekti täpse digitaalmudeli saamiseks, et seda uurida ja reprodutseerida.
- Valmis dokumentatsioon: Rajatise või ehitise olukorra täpseid mudeleid saab hankida projektide, hoolduste jms läbiviimiseks. Näiteks saab mudeleid analüüsides tuvastada liikumisi, deformatsioone jne.
- digitaalne meelelahutus: saab kasutada objektide või inimeste skannimiseks kasutamiseks filmides ja videomängudes. Näiteks saate skannida tõelist jalgpallurit ja luua selle animeerimiseks 3D-mudeli, et see oleks videomängus realistlikum.
- Kultuuri- ja ajaloopärandi analüüs ja konserveerimine: Seda saab kasutada analüüsimiseks, dokumenteerimiseks, digitaalsete dokumentide loomiseks ning abiks kultuuri- ja ajaloopärandi säilitamisel ja hooldamisel. Näiteks skulptuuride, arheoloogia, muumiate, kunstiteoste jms analüüsimiseks. Nende paljastamiseks ja originaalide kahjustamise vältimiseks saab luua ka täpseid koopiaid.
- Looge stsenaariumide digitaalseid mudeleid: stsenaariume või keskkondi saab analüüsida, et määrata maastiku kõrgusi, teisendada rajad või maastikud digitaalsesse 3D-vormingusse, luua 3D-kaarte jne. Pilte saab jäädvustada 3D laserskannerite, RADARi, satelliidipiltide jne abil.
Kuidas valida 3D skannerit

Millal vali sobiv 3D-skanner, kui kahtlete mitme mudeli vahel, peaksite analüüsima mitmeid omadusi, et leida see, mis sobib kõige paremini teie vajadustele ja investeerimiseks mõeldud eelarvega. Punktid, mida meeles pidada, on järgmised:
- Presupuesto: Oluline on kindlaks teha, kui palju saate oma 3D-skannerisse investeerida. Neid on 200–300 eurost tuhandete eurodeni. See sõltub ka sellest, kas see on mõeldud kodukasutuseks, kuhu ei tasu liiga palju investeerida, või tööstuslikuks või professionaalseks kasutamiseks, kus investeering tasub end ära.
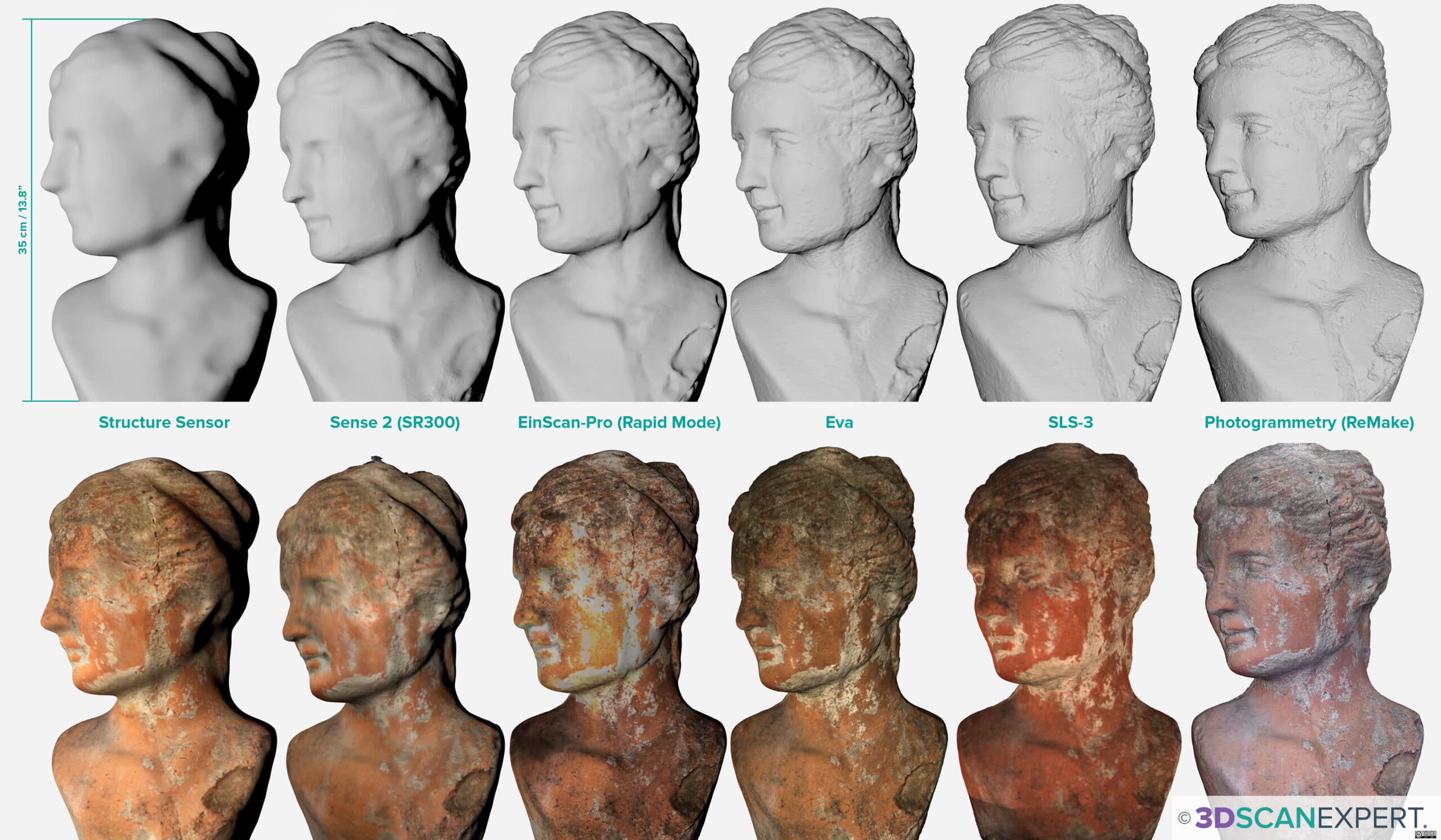
- Täpsus: on üks olulisemaid funktsioone. Mida parem on täpsus, seda paremaid tulemusi saate. Kodurakenduste jaoks võib piisata madalast täpsusest, kuid professionaalsete rakenduste jaoks on oluline olla väga täpne, et saada 3D-mudeli väikseimgi detail. Paljud kaubanduslikud skannerid on tavaliselt vahemikus 0.1 mm kuni 0.01 mm, vähem täpsest kuni täpsemini.
- Resolutsioon: seda ei tohiks segi ajada täpsusega, kuigi sellest sõltub ka saadava 3D-mudeli kvaliteet. Kui täpsus viitab seadme absoluutse korrektsuse astmele, siis eraldusvõime on minimaalne kaugus, mis võib 3D-mudeli kahe punkti vahel eksisteerida. Tavaliselt mõõdetakse seda millimeetrites või mikronites ja mida väiksem, seda paremad tulemused.
- Skaneerimise kiirus: on skannimiseks kuluv aeg. Olenevalt kasutatavast tehnoloogiast saab 3D-skannerit ühel või teisel viisil mõõta. Näiteks struktureeritud valguspõhiseid skannereid mõõdetakse FPS-is või kaadrites sekundis. Teisi saab mõõta punktides sekundis jne.
- Kasutusmugavus: See on veel üks oluline punkt, mida 3D-skanneri valimisel arvestada. Kuigi paljud neist on juba piisavalt hõlpsasti kasutatavad ja piisavalt arenenud, et saaksid töö tehtud ilma kasutajapoolse sekkumiseta, leiate ka mõned neist keerukamad kui teised.
- osa suurus: Nii nagu 3D-printeritel on mõõtmete piirangud, on seda ka 3D-skanneritel. Väikeste objektide digitaliseerimist vajava kasutaja vajadused ei ole samad, kes soovivad seda kasutada suurte objektide jaoks. Paljudel juhtudel kasutatakse neid erineva suurusega objektide skannimiseks, nii et need peaksid sobima minimaalse ja maksimaalse ulatusega, millega mängite.
- Teisaldatavus: Oluline on kindlaks teha, kus võtteid plaanitakse teha ja kas see peab olema kerge, et kaasas kanda ja erinevates kohtades stseene jäädvustada jne. Samuti on olemas akutoitel, et saaks katkematult jäädvustada.
- Ühilduvus: Oluline on valida oma platvormiga ühilduvad 3D-skannerid. Mõned neist on platvormidevahelised, ühildudes erinevate operatsioonisüsteemidega, kuid mitte kõigiga.
- tarkvara: See on see, mis 3D-skannerit tegelikult juhib, nende seadmete tootjad rakendavad tavaliselt oma lahendusi. Mõnel on tavaliselt lisafunktsioonid analüüsiks, modelleerimiseks jne, teised on lihtsamad. Kuid olge ettevaatlik, sest mõned neist programmidest on tõesti võimsad ja vajavad teie arvutilt teatud miinimumnõudeid (GPU, CPU, RAM). Samuti on hea, et arendaja pakub head tuge ja sagedasi värskendusi.
- hooldus: Positiivne on ka see, et püüdmisseadet hooldatakse võimalikult kiiresti ja lihtsalt. Mõned 3D-skannerid vajavad rohkem kontrolli (optika puhastamine jne) või käsitsi kalibreerimist, teised teevad seda automaatselt jne.
- Keskmine: Oluline on kindlaks teha, millised tingimused on 3D-mudeli jäädvustamise ajal. Mõned neist võivad mõjutada mõnda seadet ja tehnoloogiat. Näiteks valguse hulk, niiskus, temperatuur jne. Tootjad näitavad tavaliselt vahemikku, mille all nende mudelid hästi töötavad, ja peate valima selle, mis sobib teie otsitavate tingimustega.
Lisainformatsiooni
- Parimad vaigust 3D-printerid
- Printeri osad ja remont
- Filamendid ja vaik 3D-printeritele
- Parimad tööstuslikud 3D-printerid
- Parimad 3D-printerid koduseks kasutamiseks
- Parimad odavad 3D-printerid
- Kuidas valida parim 3D-printer
- Kõik STL-i ja 3D-printimise vormingute kohta
- 3D-printerite tüübid
- 3D-printimise alustamise juhend