Paljud elektroonilised projektid vajavad juhtimise elementi ja see juhtub, kui teil on güroskoop või güroskoop. See element suudab tuvastada ka seadme liikumisi või pöördeid ning aitab tekitada reaktsiooni selle liikumise vastu. Näiteks kui see on käsk, võib see pöörata suunas, milles kasutaja soovib elementi või videomängu juhtida.
The güroskoobi rakendused, nagu võite ette kujutada, on palju, näiteks nutitelefonide integreeritud, et oleks võimalik teada saada, kui ekraan on pööratud, ja teha opsüsteemil mõningaid juhtimistoiminguid, hallata sõidukeid või videomängu tegelasi jne. See on integreeritud ka mõnda sülearvutisse, et teha kindlaks, kas varustus on maha visatud, ja seega oleks võimalik kõvaketas (HDD) õigeaegselt välja lülitada, et vältida pea pöörleva ketta löömist ja purunemist jne.
Nendega saab ka harjuda juhtimissüsteemid, et teada saada, kuhu seade läheb. See teenib nii autonoomseid roboteid kui ka muid süsteeme, mis peavad ilma sekkumiseta või kasutaja sekkumiseta olema korralikult orienteeritud. Droonidele on paigaldatud ka seda tüüpi elemendid ja isegi virtuaalse reaalsuse prillid, liit- või segareaalsus, et oleks võimalik kuvatavat pilti vastavalt kasutaja liikumisele kohandada ...
Ka sõjatööstus Sellel on olnud palju rakendusi, näiteks see on suutnud juhtida esimesi rakette ja rakette, mida tänu nendele güroskoobidele saaks sihtmärgile paremini orienteerida. Lisaks võib see koos tänapäevaste satelliitsüsteemidega nagu GPS olla väga täpne.
Nagu sa näed, rakendusi on paljuja kindlasti on teil kui tegijal oma tulevase isetegemise projekti jaoks rohkem oma peas ...
Vähe de historia
El orientatsioonitaju see on olnud vajalik juba aastaid, eriti navigeerimise puhul. Esimesed süsteemid põhinesid pöörleval pinnal, nagu britt John Serson XNUMX. sajandil. Sellega kavatses ta pöörlevat tippu veel kord kasutada, et oleks võimalik avamerel silmapiiri leida, kui nähtavus on vähenenud või null.
Vähehaaval arenesid orientatsiooniseadmed kuni esimese güroskoobini kui sellisena tõuseks kuni 1852. aastani, Foucault 'leiutisega. See kerkis esile Maa pöörlemise demonstreerimise katse tulemusena. Pendliga element, mis suudaks seda pööret lihtsal viisil näidata.
Vähehaaval arenesid mehaanilised seadmed koos torpeedode ja rakettide lennundus- ja sõjatööstuse levikuga. Selles mõttes on vaja rõhutada Sperry Corpi güroskoop, sõjatööstuse jaoks ja sellest sai üks esimesi suunavaid ja kaasaegseid kontseptsioone.
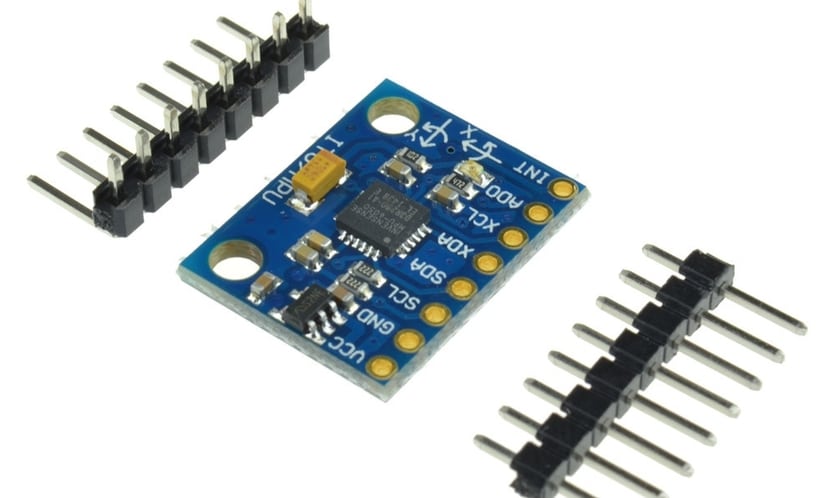
Pärast seda hakkaksid nad täpsustama, mõõtmeid vähendama, täpsust suurendama, kuni jõuavad praeguste süsteemideni elektrooniline ja miniatuurne tänu sellistele tehnoloogiatele nagu MEMS. Selle põhjal nägime juba midagi MPU6050 toode sellest blogist.
Kuidas güroskoop töötab?
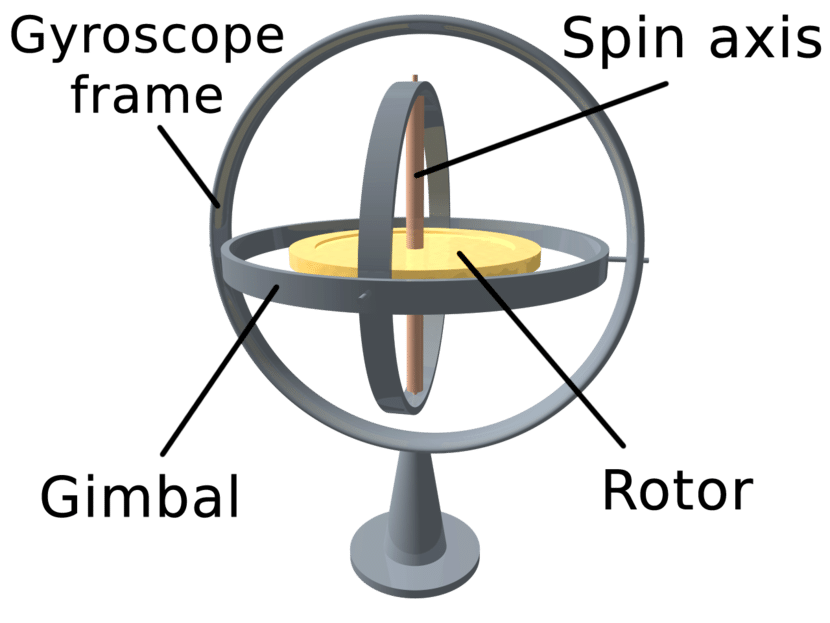
Güroskoop või güroskoop põhineb güroskoobi efekt. See on nähtus, mis tekib siis, kui horisontaalteljele paigaldatud kettast moodustatud seade, mille ümber ketas vabalt suure kiirusega pöörleb. Kui vaatleja hoiab tausta telge vasaku käega ja esikülje paremat, tunneb ta paremat kätt langetades ja vasakut üles tõstes väga omapärast käitumist.
Vaatleja tunneb seda güroskoop surub su paremat kätt ja tõmbab vasakut kätt. Seda nimetatakse güroskoobi efektiks. Ma ei tea, kas olete selle töötamise ajal kunagi käes hoidnud suure pöörlemiskiirusega (7200 p / min) mehaanilist kõvaketast (HDD), kuid kindlasti märkate, et selle liigutamisel on teatud inerts, midagi niimoodi ma siin teiega räägin ...
Noh, seda nähtust kasutavad tavalised güroskoobid, et teada saada, millal liikumine toimub. Kuigi praegune sisseehitatud mikroelektroonilised seadmed Selles artiklis viidatud tehnoloogilistes seadmetes on need keerukad elemendid, mis haaravad erineva efekti abil nurga nihke ajaühikus või kui kiiresti keha oma telje ümber pöörleb.
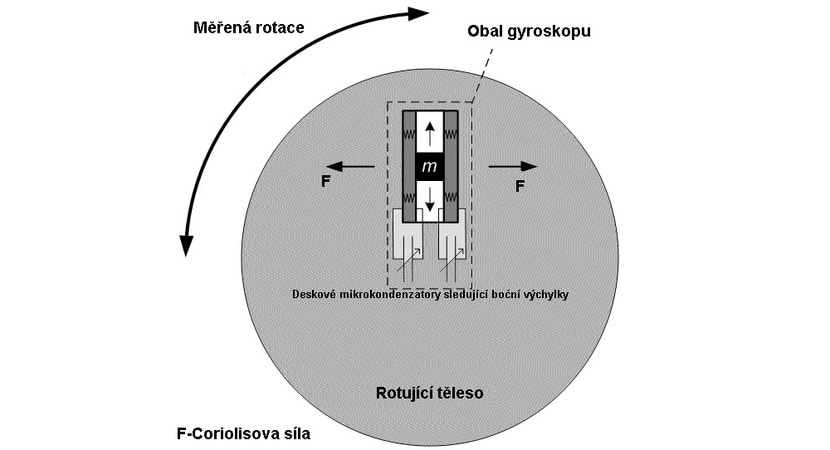
Nad saavad tänu seadmele väga hea täpsuse Tuntud efektiga MEMS näeb välja nagu Coriolis. Sel juhul avastas selle prantslane Gaspard-Gustave Coriolis 1836. aastal. Mõju täheldatakse pöörlevas võrdlusraamis, kui keha on referentsraami suhtes liikuv. See koosneb keha suhtelisest kiirendusest nimetatud pöörlemissüsteemis. Nimetatud kiirendus on alati risti süsteemi pöörlemistelje ja kere kiirusega.
Sel juhul läbib objekt pöörleva vaatleja seisukohast kiirenduse, justkui oleks objektil ebareaalne jõud, mis seda kiirendab. See on inertsiaalne või fiktiivne Coriolise jõud, tänu millele see võib olla mõõta nurkkiirust, nurkkiiruse integreerimine aja suhtes, nurga nihkumine või lihtsalt teadmine, kas objekt on liikunud ...
Täpsemalt, a MEMS tüüpi andur, teil on sees väike kiip, milles on kasutatud güroskoopi, mille suurus jääb vahemikku 1 kuni 100 mikromeetrit, see tähendab isegi väiksemat kui inimese juuksed. See seade on piisav, nii et selle pööramisel liigub väike resonantsmass koos nurkkiiruse muutustega, mis omakorda tekitab väga väikese vooluga elektrilisi signaale, mida juhtimisahelad loevad ja tõlgendavad.
Omadused, mida peaksite jälgima güroskoobi abil

Mõned omadused, mida peaksite selle puhul arvesse võtma vali güroskoop teie projekti eson:
- Rango: maksimaalne nurkkiirus, mida see suudab mõõta, ei tohiks ületada valitud güroskoobi maksimaalset vahemikku. Kuid teil peaks olema ka parim võimalik tundlikkus ja see saavutatakse, muutes güroskoopide vahemiku mitte palju suuremaks kui vaja.
- Liides: See ei ole liiga suur probleem, kuna 95% turul olevatest güroskoopidest on analoogväljundiga, ehkki mõned neist on SPI tüüpi või I2C siini digitaalse liidesega.
- Telgede arv: nagu kiirendusmõõturites, on see midagi väga olulist. Neil pole tavaliselt nii palju telgi saadaval kui kiirendusmõõturitel, kuid mida rohkem, seda parem. Tänapäeval on hakanud ilmuma mõni 3-telg, mis on väga hea asi. Kuid enamikul mudelitel on 1 või 2 telge, millest peaks enamiku projektide jaoks piisama. Kolmeteljelistel peaksite uurima mudeli teavet, et teada saada, milline telg pööret mõõdab, kuna ülejäänud kaks saavad mõõta ka objekti sammu ja rulli, teine aga kõrgust ja haigutamist.
- Tarbimine: veel üks oluline omadus, sest kui teie projekt sõltub akust või elemendist, peate valima sellise, mis tarbib vähe energiat. Üldiselt pole see liiga palju, keskmine tarbimine on tavaliselt umbes 100 mikroamprit. Mõnel edasijõudnutel on toite peatamise funktsioon, kui neid ei kasutata.
- Lisad: mõnel võivad samas moodulis olla mõned lisad, näiteks kiirendusmõõturi andurid, temperatuurimõõturid jms.
Samuti, kui ostate moodulidNeil on kiip ja PCB koos mõne lisaga, mis hõlbustab nende integreerimist Arduinoga, näiteks pakkudes ühenduse ja toite tihvte jne.
Gyros, mida saate osta
Mitu güroskoope, mida saate osta kui MPU6050 mis sisaldab ka kiirendusmõõturit. Me kirjeldasime seda juba teises artiklis, kuid lisaks sellele on ka teisi, mida saate hõlpsasti integreerida oma elektroonilistesse projektidesse koos Arduinoga.
- Saate osta sellist güroskoopi nagu ST Microelectronics LPY503AL. See on üks populaarsemaid ja saate selle andmelehte lugeda siit.
- Võite kasutada ka inertsiaalne andur kui Tooteid ei leitud.,Tooteid ei leitud. e Tooteid ei leitud., lisaks MPU6050 ...
Selle ühendus ja integreerimine Arduinoga sõltub igast mudelist ja tootjast. Kuid see pole keeruline. Saate neid kontrollida andmelehed ja kinnituslehed teada, kuidas neid hallata. Küsimus on teada, kuidas nad töötavad, et teada saada, kuidas arvutada nurga nihet ja et teie Arduino IDE-s olev kood tõlgendab seda ja genereerib vastavalt sellele toimingu ...