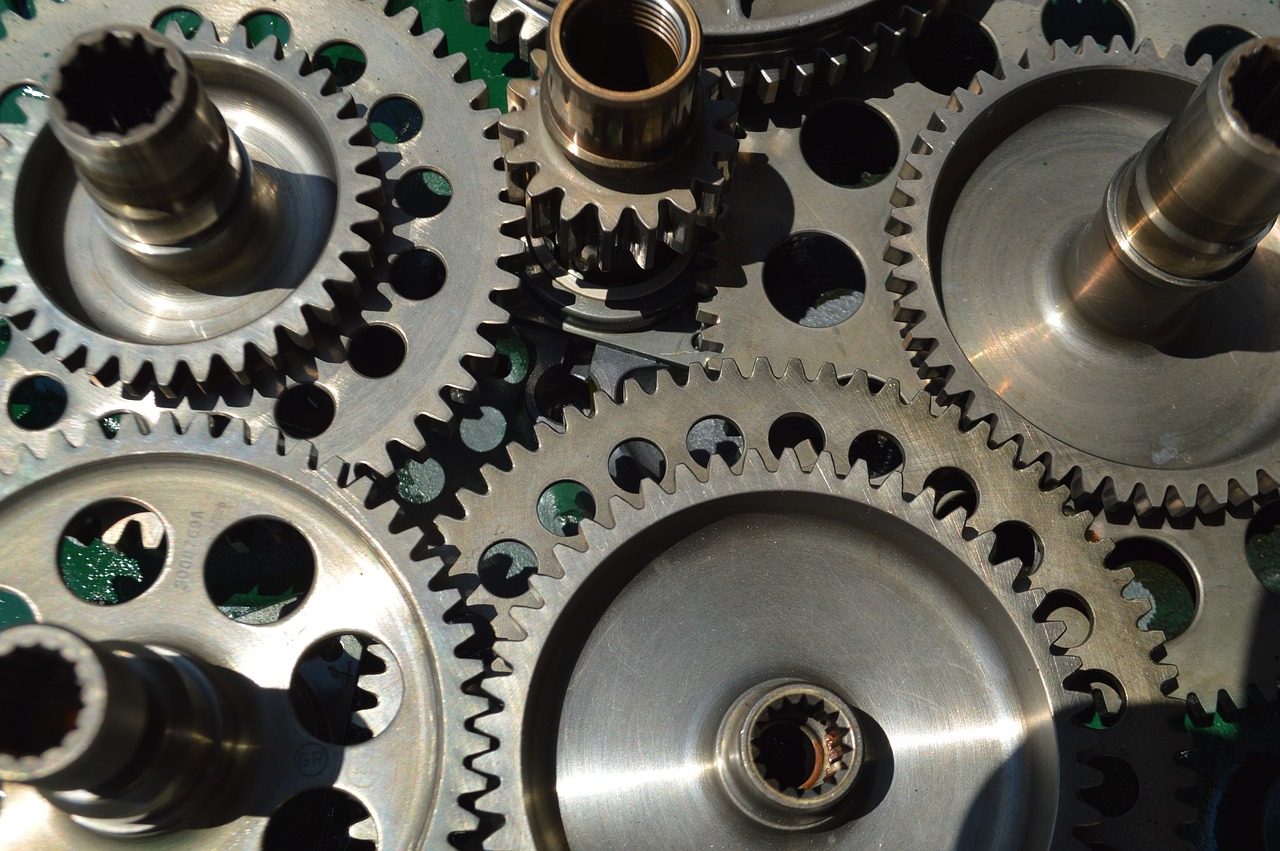
osa hammasrattad Need on paljudes praegustes mehhanismides, alates analoogkelladest kuni sõidukite mootorite, käigukastideni, robotite, printerite ja paljude teiste mehhatrooniliste süsteemide kaudu. Tänu neile saab ülekandesüsteeme teha ja minna kaugemale liikumise edastamisest, nad saavad seda ka muuta.
Seetõttu on need väga olulised elemendid, mis peaksite teadma, kuidas nad töötavad Õigesti. Nii saate oma projektide jaoks kasutada sobivaid hammasrattaid ja paremini mõista nende toimimist ...
Mis on käik?

On ketisüsteeme, rihmarattasüsteeme, hõõrdrattaid jne. Kõik nemad ülekandesüsteemid oma eeliste ja puudustega. Kuid kõigist neist paistab silma reduktor, mis on tavaliselt oma omaduste poolest lemmikud:
- Nad taluvad hammastest tingitud suuri jõude ilma libisemiseta, nagu hõõrdrataste või rihmarataste puhul.
- See on pööratav süsteem, mis on võimeline edastama jõudu või liikumist mõlemas suunas.
- Need võimaldavad väga täpset liikumise juhtimist, nagu on näha samm-mootorid, Näiteks.
- Need võimaldavad kettide või rihmarataste ette luua kompaktseid ülekandesüsteeme.
- Iga telje pöörlemise häirimiseks saab kombineerida erinevaid suurusi. Üldiselt nimetatakse kahe hammasratta kasutamisel suuremat käiku rattaks ja väikeseks hammasrattaks.
Un hammasratas või hammasratas see pole midagi muud kui ratta tüüp, mille välimisele või sisemisele servale on nikerdatud rida hambaid, olenevalt käiguliigist. Need ketirattad on pöörlevas liikumises, et tekitada pöördemomenti võllidele, mille külge nad on kinnitatud, ja neid saab grupeerida, et tekitada keerukamaid hammasrattaid, mis sobivad nende hambad kokku.
Ilmselt selleks, et see oleks võimalik, hammaste tüüp ja suurus peab sobima. Vastasel juhul on need kokkusobimatud ja ei sobi. Neid parameetreid käsitletakse järgmises osas ...
Käigu osad
Et kaks käiku kokku sobiks, võiks hammaste läbimõõt ja arv erineda, kuid need peavad arvestama rea teguritega, mis muudavad hammasratta üksteisega ühilduvad, näiteks hamba tüüp, mida nad kasutavad, mõõtmed jne.
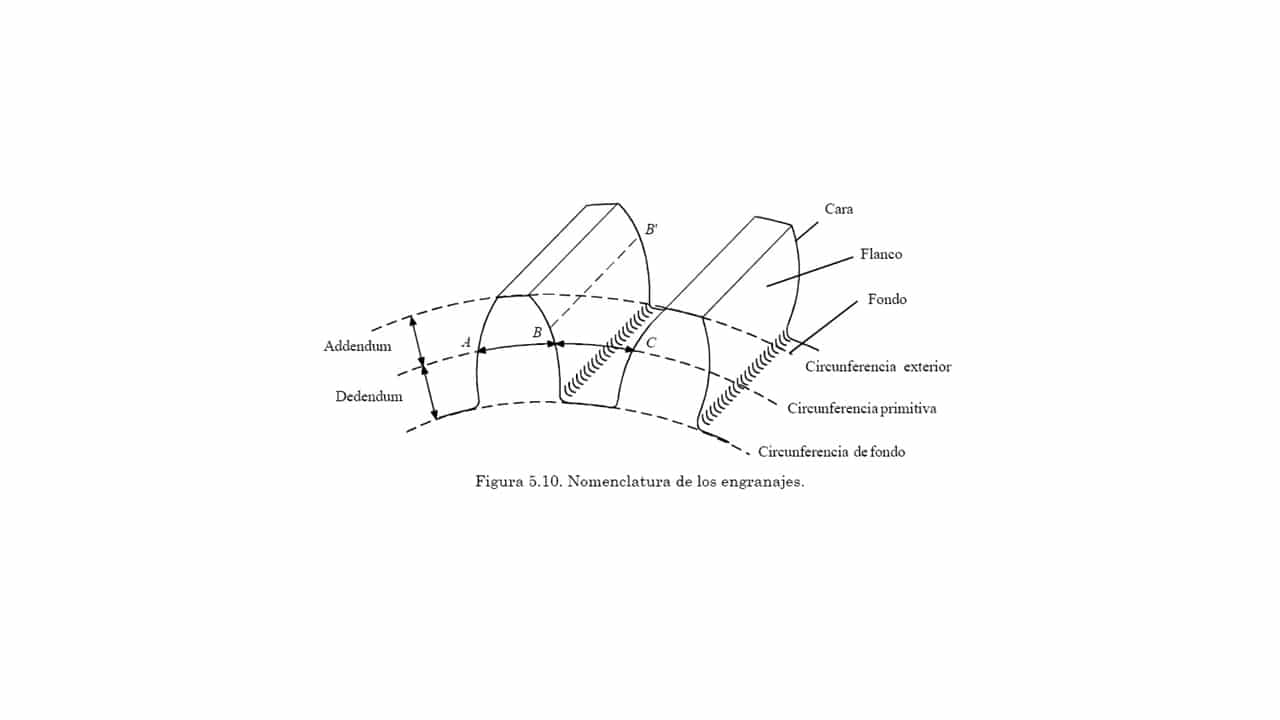
Nagu eelmisel pildil näha, on mitu osa käiguga, mida peaksite teadma:
- Septum või käsivarred: see on osa, mis vastutab võra ja kuubi ühendamise eest, et liikumist edasi anda. Need võivad olla enam-vähem paksud ning selle koostis ja tugevus sõltuvad suuresti tugevusest ja kaalust. Mõnikord läbistatakse need tavaliselt kaalu vähendamiseks, teinekord valitakse kindel vahesein.
- Kuubik: see on osa, kuhu on kinnitatud liikumise ülekandevõll ja mis on kinnitatud vaheseina külge.
- Pärg: on hammasratta pindala, kus hambad on lõigatud. See on kõige olulisem, kuna sellest sõltub käigu ühilduvus, käitumine ja jõudlus.
- Hammas: see on üks krooni hammastest või väljaulatuvatest osadest. Hamba saab jagada mitmeks osaks:
- Hari: on hamba välimine osa või ots.
- Nägu ja külg: on hamba külje ülemine ja alumine osa, st kahe võrgusilma ühendava hammasratta kokkupuutepind.
- Valley: see on hamba alumine osa või kahe hamba vaheline ala, kuhu asetatakse teise hammasratta hari, millega see võrgusilma ühendab.
See kõik genereerib rea krooni geomeetriad mis eristab käikude tüüpe ja omadusi:
- Juurte ümbermõõt: tähistab hammaste orgu või põhja. See tähendab, et see piirab hammasratta siseläbimõõtu.
- Ürgne ümbermõõt: määrab jaotuse hamba külje kahe osa vahel: nägu ja külg. See on väga oluline parameeter, kuna kõik teised on määratletud selle põhjal. See jagab hamba kaheks osaks, dedendum ja addendum.
- Hammaste jalg või dedendum: see on hamba alumine ala, mis jääb algse ümbermõõdu ja juure ümbermõõdu vahele.
- Hambapea või lisa: hamba ülemine ala, mis ulatub algsest ja välimisest ümbermõõdust.
- Pea ümbermõõt- tähistab hammaste harja ehk hammasratta välisläbimõõtu.
Nagu võite ette kujutada, saate seda sõltuvalt kroonist, läbimõõdust ja hammaste tüübist käiku vahetada vastavalt:
- Hammaste arv: see määrab ülekandearvu ja on üks kõige määravamaid parameetreid selle käitumise määramiseks ülekandesüsteemis.
- Hamba kõrgus: kogu kõrgus orust harjani.
- Ümmargune samm: kaugus hamba ühe osa ja järgmise hamba sama osa vahel. See tähendab, kui kaugel on hambad üksteisest, mis on seotud ka arvuga.
- Paksus: on hammasratta paksus.
Gear-rakendused
The käikude rakendused neid on palju, nagu ma juba varem kommenteerisin. Mõned selle praktilised rakendused on:
- Sõiduki käigukastid.
- Astmemootorid pööramise juhtimiseks.
- Hüdraulilised pommid.
- Igasugused mootorid, näiteks pööramise või liikumise ülekande elemendid.
- Diferentsiaalsed mehhanismid.
- Printerid peade või rullide liigutamiseks.
- Robotid liikuvate osade jaoks.
- Tööstusmasinad.
- Analoogkellad.
- Mehaaniliste osadega kodumasinad.
- Liikuvate osadega elektroonikaseadmed.
- Ukse avamise mootorid.
- Liikuvad mänguasjad.
- Põllutöömasinad.
- Lennundus.
- Energia tootmine (tuule-, termiline, ...).
- ja nii edasi
Arduino, robotite jms jaoks saate oma projektide jaoks arvukalt muid rakendusi välja mõelda. Saate automatiseerida paljusid mehhanisme ja mängida kiirustega jne.
Hammasrataste tüübid
Vastavalt selle hammastele ja käigu enda omadustele on teil erinevat tüüpi hammasrattaid käeulatuses, millest kõigil on oma eelised ja puudused, seega on oluline valida iga rakenduse jaoks sobiv.
osa kõige tavalisemad tüübid Heli:
- Silindriline: kasutatakse paralleelsete telgede jaoks.
- Otse: need on kõige tavalisemad, mida kasutatakse juhul, kui on vaja lihtsat käiku, millel pole eriti suurt kiirust.
- Spiraalsed: need on mõnevõrra arenenum versioon eelmistest. Neis on hambad paigutatud paralleelsete heeliksiteedena silindri ümber (ühe- või kahekordsed). Neil on sirgete ees selge eelis, näiteks on nad vaiksemad, töötavad suurematel kiirustel, suudavad edastada rohkem energiat ning liikumine on ühtlasem ja ohutum.
- Kooniline: neid kasutatakse liikumiseks telgede vahel, mis on paigutatud erineva nurga alla, isegi 90 °.
- Otse: nad kasutavad sirgeid hambaid ja jagavad omadusi sirgete silindriliste hammastega.
- Spiraal: sel juhul toetavad nad suuremat kiirust ja jõude, nagu juhtus spiraalidega.
- Sisemine käik: selle asemel, et hambad või kroon oleks nikerdatud väljastpoolt, on neil see sees. Need pole nii levinud, kuid neid kasutatakse ka teatud rakenduste jaoks.
- Planetaariumid: see on hammasrataste komplekt, mida kasutatakse teatud ülekandesüsteemides, kus on keskne käik, mille ümber teised väiksemad pöörlevad. Sellepärast on tal see nimi, kuna nad näivad olevat orbiidil.
- Lõputu kruvi: see on mõnes tööstuslikus või elektroonilises mehhanismis tavaline käik. See kasutab käiku, mille hambad on lõigatud spiraalseks. Need tekitavad väga püsiva kiiruse ning ilma vibratsiooni ja müra. Nad võivad edastada sirgjoonelist ratast, mille telg on kaldu lõputu kruvi külge.
- Rack ja hammasratas: see on hammasrataste komplekt, mis on ka mõnes mehhanismis tavaline ja mis võimaldab muuta telje pöördliikumise lineaarseks või vastupidi.
Kui sa käid kohal Tema kompositsioonsaate eristada ka järgmisi materjale:
- MetallidNeed on tavaliselt valmistatud erinevat tüüpi terasest, vasesulamitest, alumiiniumisulamitest, malmist või hallmalmist, magneesiumisulamitest jne.
- Plastid: neid kasutatakse elektroonikas, mänguasjades jne. Need on polükarbonaat-, polüamiid- või PVC-hammasrattad, atsetaalvaigud, PEEK polüeeteretketoon, polütetrafluoroetüleen (PTFE) ja vedelkristallpolümeerid (LCP).
- Madera: need pole levinud, ainult vanades mehhanismides või teatud mänguasjades.
- teised: on tõenäoline, et väga erijuhtudel kasutatakse muid kiude või konkreetseid materjale.
Kust osta hammasrattaid?
Te leida erinevat tüüpi hammasrattaid paljudes mehaanika- või elektroonikakauplustes. Näiteks siin on mõned näited:
- Plastmootoriga käigukomplekt. 64 erineva tüübiga.
- Tooteid ei leitud.
- Komplekt 16 erinevast metallosast, kaasa arvatud spiraalid.
- Spindli plastikust hammasrataste komplekt.
Need tooted on väikese suurusega, kui vajate suuremaid käike, siis tõenäoliselt ei leia neid nii lihtsalt. Samuti, kui vajate midagi väga spetsiifilist, saavad paljud treiali töökojad tee see endale. 3D printerid Samuti aitavad nad tegijatel oma käike luua.
Hammasratasüsteemide põhiarvutused
Nagu näete selles GIF-is, peate mõistma, et kui kaks käiku võrku jäävad, siis mõlemad teljed pöörleb vastassuunas ja mitte samas mõttes. Nagu näete, pöörab punast sakilist rue pöörates see paremale, sinine aga vasakule.
seetõttu telje pöörlemiseks samas suunas oleks vaja lisada veel üks lisaratas, näiteks roheline. Nii pöörlevad punane ja roheline samas suunas. Selle põhjuseks on asjaolu, et kui sinine pööratakse vasakule, muudab roheline sinakasroheliseks muutumisel pöörlemissuuna uuesti, sünkroonides punasega.
Teine asi, mida saab selles GIF-is hinnata, on pöörlemiskiirus. Kui kõigil hammasratastel oleks sama läbimõõt ja hammaste arv, pöörleksid kõik võllid sama kiirusega. Teisalt, kui hamba arvu / läbimõõtu muudetakse, muutub ka kiirus. Nagu sel juhul näete, pöörleb kõige kiiremini punane, kuna selle läbimõõt on väiksem, sinisel aga keskmise kiirusega ja rohelisega kõige aeglasemalt.
Vastuseks sellele on võimalik mõelda, et suurustega mängides saab kiirusi muuta. Teil on õigus, nii nagu jalgratas saab seda teha käikudega või käigukast auto ülekandearvudega. Ja mitte ainult, saate teha ka arvutusi pöörlemiskiiruse kohta.
Kui teil on kaks käiku võrgusilma, üks väike (hammasratas) ja teine suur (ratas), võib tekkida järgmine:
- Kui me kujutame ette, et mootor või veojõud rakendatakse hammasrattale ja ratast juhitakse, ehkki hammasratas pöörleb suurel kiirusel, on suurema ratta korral see aeglasem, toimides reduktor. Ainult siis, kui need oleksid sama suurusega (hammasratas = ratas), pöörleksid mõlemad teljed sama kiirusega.
- Teiselt poolt, kui me kujutame ette, et veojõu on ratas ja sellele rakendatakse kiirust, siis isegi kui see on madal, pöörleb hammasratas kiiremini, kuna selle väike suurus toimib kordaja.
Käigukasti arvutused
Kui olete sellest aru saanud, saate rakendades teha kahe käigu vahelise lihtsa ülekandesüsteemi arvutused valem:
N1 Z1 = N2 Z2
Kus Z on võrgusilmas olevate hammasrataste 1 ja 2 hammaste arv ja N võlli pöörlemiskiirus p / min (pööret minutis või pööret minutis). Sest ejemplokujutage ette, et ülaltoodud GIF-is lihtsustamiseks:
- Punane (ajam) = 4 hammast ja mootor pöörleb oma võllile pöörlemiskiirust 7 RPM.
- Sinine = 8 hammast
- Roheline = 16 hammast
Kui soovite selles süsteemis pöörde arvutada, peate kõigepealt arvutama sinise kiiruse:
4 7 = 8 z
z = 4 7/8
z = 3.5 p / min
See tähendab, et sinine telg pöörleks kiirusel 3.5 RPM, mis on mõnevõrra aeglasem kui punase 4 RPM. Kui soovite arvutada rohelise pöörde, siis nüüd, kui teate sinise kiirust:
8 3.5 = 16 z
z = 8 3.5/16
z = 1.75
Nagu näete, pöörleb roheline kiirusega 1.75 p / min, mis on aeglasem kui sinine ja roheline. Ja mis juhtuks, kui mootor asub rohelisel teljel ja veoratas pöörleb 4 p / min juures, siis pöörlemine on sinise puhul 8 p / min, punase puhul 16 p / min.
Sellest järeldub, et kui veoratas on väike, saavutatakse lõppvõllil madalam kiirus, kuid suurem jõud. Juhul, kui veojõu kannab suur ratas, saavutab väike ratas suurema kiiruse, kuid vähem jõudu. Sest seal võimsus või pöördemoment teistsugune? Vaadake seda valemit:
P = T ω
Kus P on võlli edastatud võimsus vattides (W), T on väljatöötatud pöördemoment (Nm), ω nurkkiirus, mille juures võlli pöörleb (rad / s). Kui mootori võimsus säilib ja pöörlemiskiirust korrutatakse või vähendatakse, muudetakse ka T. Sama juhtub ka siis, kui T hoitakse konstantsena ja pöörlemiskiirust muudetakse, siis muudetakse P.
Tõenäoliselt soovite ka arvutada, kas telg pöörleb kiirusel X RPM, kui palju see lineaarselt edasi liiguks, st lineaarne kiirus. Näiteks kujutage ette, et punasel on teil alalisvoolumootor ja rohelisel teljel olete ratta asetanud nii, et mootor liiguks pinnal. Kui kiiresti see läheks?
Selleks peate lihtsalt arvutama paigaldatud rehvi ümbermõõdu. Selleks korrutage läbimõõt Pi-ga ja see annab teile ümbermõõdu. Teades, kui palju ratas võib iga pöördega edasi liikuda, ja võttes arvesse seda, mis pöördeid minutis teeb, saab lineaarse kiiruse ...
Siin ma näitan teile videot, et saaksite sellest paremini aru saada:
Ussiratta ja ketiratta arvutused
Mis puutub ussikäik ja ketiratas, saab arvutada järgmise valemiga:
i = 1 / Z
Seda seetõttu, et selles süsteemis peetakse kruvi spiraalselt lõigatud ühe hambaga ketirattaks. Nii et kui teil on näiteks 60-hambaline ketiratas, siis on see 1/60 (see tähendab, et kruvi peaks pöörlema 60 korda, et ketiratas saaks 1 pöörde). Lisaks on see mehhanism, mis ei ole pööratav nagu teised, see tähendab, et ketiratast ei saa ussi pööramiseks pöörata siin saab veovõlliks olla ainult uss.
Racki ja hammasratta arvutused
Süsteemi jaoks Hammas ja hammasratas, arvutused muutuvad uuesti, antud juhul on need:
V = (p Z N) / 60
See tähendab, et korrutage hammasratta hammaste samm (meetrites) hammasratta hammaste arvuga ja hammasratta pöörete arvuga (pööretes minutis). Ja see jagatakse 60-ga. Näiteks kujutage ette, et teil on süsteem, millel on 30 hammasratast, 0.025 m samm ja 40 RPM pöörlemiskiirus:
V = (0.025) / 30
V = 0.5 m / s
See tähendab, et see liiguks iga sekundiga pool meetrit edasi. Ja sel juhul jah, see on pöörduvSee tähendab, et kui hammas on pikisuunas nihutatud, saab hammasratta pöörlema panna.
Valemit arvestades võiksite isegi arvutada, kui kaua kulub vahemaa läbimiseks ühtlane joone liikumine (v = d / t), see tähendab, et kui kiirus on võrdne ajaga jagatud vahemaaga, siis aeg kustutatakse:
t = d / v
Seega, juba teades kiirust ja vahemaad, mida soovite näiteks arvutada, kujutage ette, et soovite arvutada, kui kaua kulub 1 meetri läbimiseks:
t = 1 / 0.5
t = 2 sekundit
Loodan, et olen aidanud teil omandada vähemalt kõige olulisemad teadmised hammasrataste kohta, et saaksite aru, kuidas need töötavad ja kuidas saate neid oma tulevastes projektides enda kasuks kasutada.
Minusuguse (õnneks pensionile jäänud) tegija jaoks on suurepärane omada selget, kokkuvõtlikku ja täielikku teavet käikude kujundamise ja nende printimise kohta. Palju õnne