Les Équipement Ils se trouvent dans une multitude de mécanismes actuels, des horloges analogiques aux moteurs de véhicules, boîtes de vitesses, en passant par les robots, les imprimantes et bien d'autres systèmes mécatroniques. Grâce à eux, des systèmes de transmission peuvent être réalisés et vont au-delà de la transmission du mouvement, ils peuvent également le modifier.
Ce sont donc des éléments très importants qui tu devrais savoir comment ils fonctionnent Correctement. Vous pourrez ainsi utiliser les bons engrenages pour vos projets et mieux comprendre leur fonctionnement...
Qu'est-ce qu'un engrenage ?

Il existe des systèmes à chaînes, des systèmes de poulies, des roues à friction, etc. Tous ceux systèmes de transmission avec ses avantages et ses inconvénients. Mais de tous, le système d'engrenage se distingue, qui sont généralement les favoris pour leurs propriétés :
- Ils peuvent supporter de grandes forces dues à leurs dents sans glisser, comme cela pourrait arriver aux roues à friction ou aux poulies.
- C'est un système réversible, capable de transmettre la puissance ou le mouvement dans les deux sens.
- Ils permettent un contrôle très précis des mouvements, comme on peut le voir dans le moteurs pas à pas, Par exemple.
- Ils permettent de créer des systèmes de transmission compacts contre chaînes ou poulies.
- Différentes tailles peuvent être combinées pour interférer avec la rotation de chaque axe. Généralement, lorsque deux pignons sont utilisés, le plus grand engrenage est appelé la roue et le petit pignon.
Un engrenage ou roue dentée Ce n'est rien de plus qu'un type de roue avec une série de dents sculptées sur son bord extérieur ou intérieur, selon le type d'engrenage dont il s'agit. Ces pignons seront en mouvement rotatif pour générer un couple sur les arbres auxquels ils sont attachés, et ils peuvent être regroupés pour générer des systèmes d'engrenages plus complexes, en ajustant leurs dents ensemble.
Evidemment, pour que cela soit possible, le type et la taille des dents doit correspondre. Sinon, ils seront incompatibles et ne conviendront pas. Ces paramètres sont ceux qui sont discutés dans la section suivante...
Parties d'un engrenage
Pour que deux engrenages s'emboîtent, le diamètre et le nombre de dents peuvent varier, mais ils doivent respecter une série de facteurs qui font l'engrenage être compatibles les uns avec les autres, comme le type de dent utilisé, les dimensions, etc.
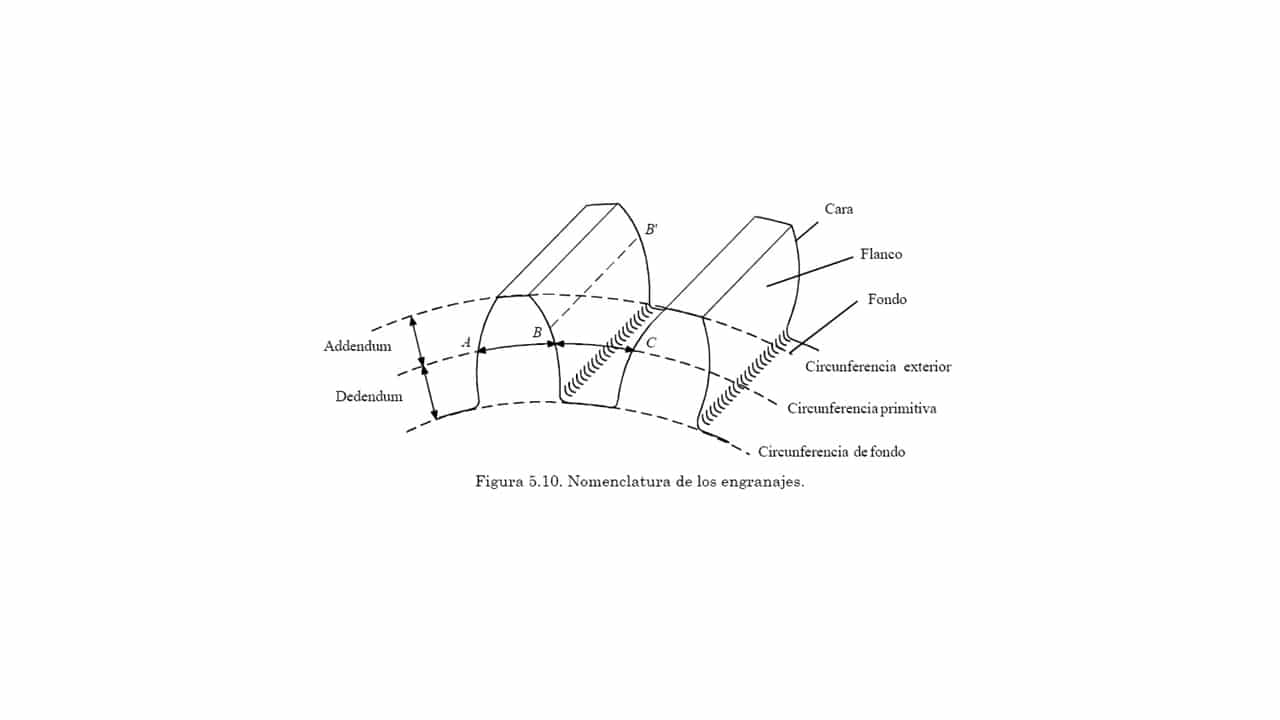
Comme vous pouvez le voir dans l'image précédente, il y a plusieurs parties dans un engrenage il faut savoir :
- Septum ou bras: c'est la partie qui se charge de joindre la couronne et le cube afin de transmettre le mouvement. Ils peuvent être plus ou moins épais, et sa composition et sa résistance dépendront largement de sa résistance et de son poids. Parfois, ils sont généralement percés pour réduire le poids, d'autres fois, une cloison solide est choisie.
- Cube: c'est la partie où est accouplé l'arbre de transmission du mouvement et qui est solidaire de la cloison.
- Corona: est la zone de l'engrenage où les dents ont été taillées. C'est le plus important, car la compatibilité, le comportement et les performances de l'équipement en dépendront.
- Dent: c'est l'une des dents ou protubérances de la couronne. La dent peut être subdivisée en plusieurs parties :
- Crête: est la partie externe ou la pointe de la dent.
- Visage et flanc: est la partie supérieure et inférieure du côté de la dent, c'est-à-dire la surface de contact entre deux roues dentées qui engrènent.
- Vallée: c'est la partie inférieure de la dent ou zone intermédiaire entre deux dents, où sera logée la crête d'une autre roue dentée avec laquelle elle engrène.
Tout cela génère une série de géométries de couronne qui distinguera les types et propriétés des engrenages :
- Circonférence de la racine: marque le creux ou le bas des dents. C'est-à-dire qu'il délimite le diamètre intérieur de l'engrenage.
- Circonférence primitive: établit la division entre les deux parties du côté de la dent : la face et le flanc. C'est un paramètre très important, puisque tous les autres sont définis en fonction de celui-ci. Il divisera la dent en deux parties, le creux et l'addenda.
- Pied de dent ou dedendum: c'est la zone inférieure de la dent qui se situe entre la circonférence d'origine et la circonférence de la racine.
- Tête de dent ou addenda: zone supérieure de la dent, qui va de la circonférence d'origine et de la circonférence externe.
- Circonférence de la tête- marquera la crête des dents, c'est-à-dire le diamètre extérieur de l'engrenage.
Comme vous pouvez l'imaginer, selon la couronne, le diamètre et les types de dents, vous pouvez changer de vitesse selon:
- Nombre de dents: il va définir le rapport de démultiplication et est l'un des paramètres les plus déterminants pour déterminer son comportement dans un système de transmission.
- Hauteur de dent: la hauteur totale, de la vallée à la crête.
- Étape circulaire: distance entre une partie de la dent et la même partie de la dent suivante. C'est-à-dire la distance entre les dents, qui est également liée au nombre.
- Espesor: est l'épaisseur de l'engrenage.
Applications d'engrenage
Les applications d'engrenage il y en a beaucoup, comme je l'ai déjà commenté précédemment. Certaines de ses applications pratiques sont :
- Boîtes de vitesses de véhicules.
- Moteurs pas à pas pour le contrôle de rotation.
- Bombes hydrauliques.
- Les moteurs de toutes sortes, tels que les éléments de rotation ou de transmission de mouvement.
- Mécanismes différentiels.
- Imprimantes pour déplacer les têtes ou les rouleaux.
- Robots pour pièces mobiles.
- Machinerie industrielle.
- Horloges analogiques.
- Appareils électroménagers avec pièces mécaniques.
- Appareils électroniques avec pièces mobiles.
- Moteurs d'ouverture de porte.
- Jouets mobiles.
- Machines agricoles.
- Aéronautiques.
- Production d'énergie (éolien, thermique, ...).
- et ainsi de suite
Vous pouvez penser à une multitude d'autres applications pour vos projets avec Arduino, robots, etc. Vous pouvez automatiser de nombreux mécanismes et jouer avec les vitesses, etc.
Types d'engrenages
Selon ses dents et les caractéristiques de l'engrenage lui-même, vous avez différents types d'engrenages à portée de main, chacun avec ses avantages et ses inconvénients, il est donc important de choisir le bon pour chaque application.
Les types les plus courants sont:
- Cylindrique: sont utilisés pour les axes parallèles.
- Droit: ce sont les plus courantes, utilisées lorsqu'on a besoin d'un simple engrenage avec des vitesses peu élevées.
- Hélicoïdal: ils sont une version un peu plus avancée des précédents. En eux, les dents sont disposées en trajectoires d'hélice parallèles autour d'un cylindre (simple ou double). Ils ont un net avantage par rapport aux lignes droites, tels qu'être plus silencieux, fonctionner à des vitesses plus élevées, peuvent transmettre plus de puissance et avoir un mouvement plus uniforme et plus sûr.
- Conique: ils sont utilisés pour transmettre le mouvement entre des axes placés à des angles différents, même à 90º.
- Droit: ils utilisent des dents droites et partagent des caractéristiques avec les cylindriques droites.
- Spirale: dans ce cas, ils supportent des vitesses et des forces plus élevées, comme cela est arrivé aux hélicoïdaux.
- Engrenage interne: au lieu d'avoir les dents ou la couronne sculptées à l'extérieur, ils l'ont à l'intérieur. Ils ne sont pas aussi courants, mais ils sont également utilisés pour certaines applications.
- Planétariums: c'est un ensemble d'engrenages utilisé dans certains systèmes de transmission où il y a un engrenage central autour duquel tournent d'autres plus petits. C'est pourquoi il porte ce nom, puisqu'ils semblent être en orbite.
- Vis sans fin: c'est un engrenage commun dans certains mécanismes industriels ou électroniques. Il utilise un engrenage dont les dents sont taillées en forme de spirale. Ils génèrent une vitesse très constante et sans vibrations ni bruit. Ils peuvent transmettre à une roue dentée droite dont l'axe est oblique par rapport à la vis sans fin.
- Crémaillère: c'est un ensemble d'engrenages qui est également courant dans certains mécanismes et qui permet de transformer un mouvement rotatif d'un axe en un mouvement linéaire ou vice versa.
Si vous assistez à Sa composition, vous pouvez également différencier des matériaux tels que :
- MétauxIls sont généralement constitués de différents types d'acier, d'alliages de cuivre, d'alliages d'aluminium, de fonte ou de fonte grise, d'alliages de magnésium, etc.
- Plastiques: utilisé dans l'électronique, les jouets, etc. Ce sont des engrenages en polycarbonate, polyamide ou PVC, des résines acétal, du polyétheréthercétone PEEK, du polytétrafluoroéthylène (PTFE) et des polymères à cristaux liquides (LCP).
- Bois: ils ne sont pas communs, seulement dans les vieux mécanismes ou dans certains jouets.
- Autres: il est probable que pour des cas très spécifiques d'autres fibres ou matériaux spécifiques soient utilisés.
Où acheter des engrenages ?
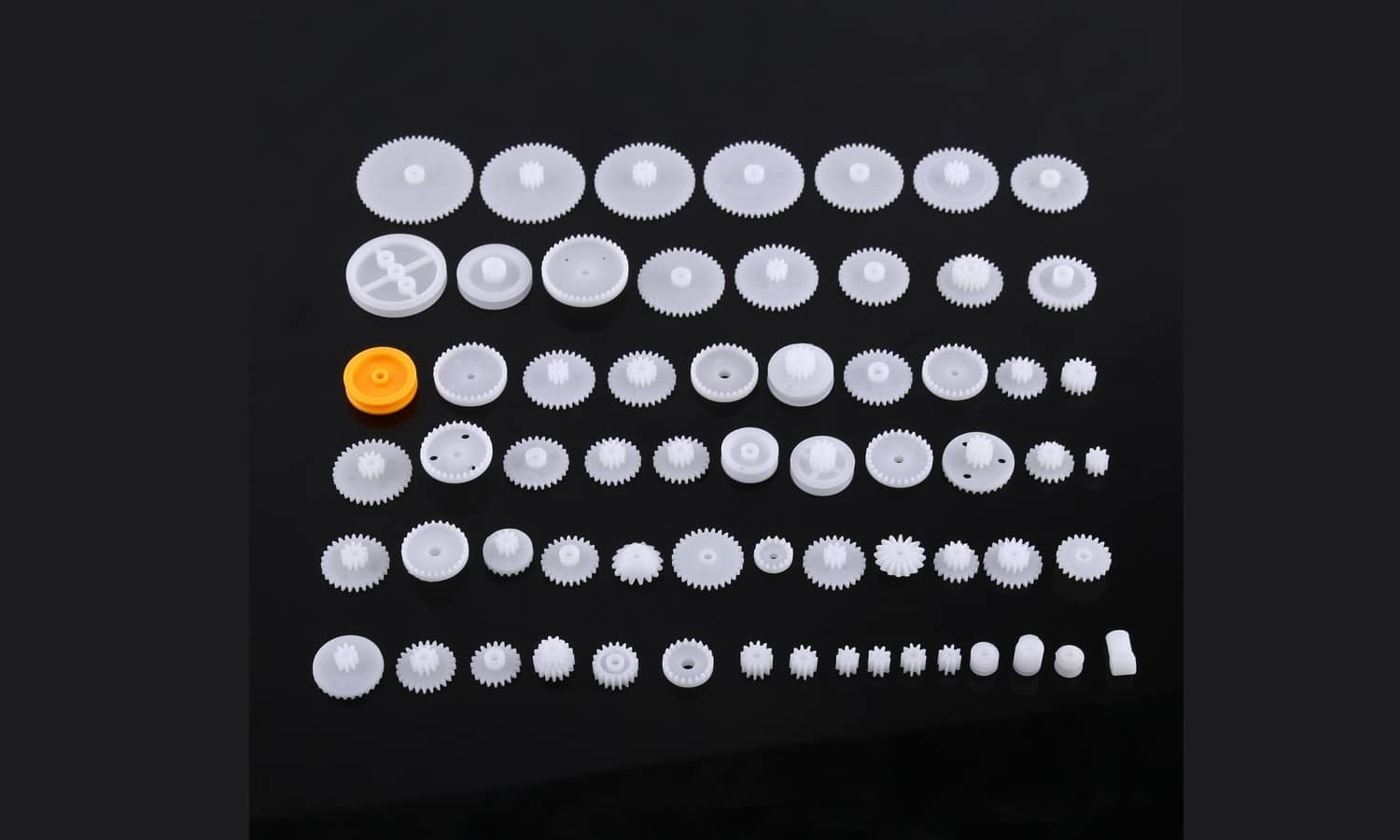
Vous trouver différents types d'engrenages dans de nombreux magasins de mécanique ou d'électronique. Par exemple, voici quelques exemples :
- Kit d'engrenages moteur en plastique. Avec 64 types différents.
- Aucun produit trouvé.
- Kit de 16 pièces métalliques différentes, y compris les hélices.
- Kit d'engrenage de broche en plastique.
Ces produits sont de petite taille, si vous avez besoin de plus gros engrenages, il est probable que vous ne les trouviez pas si facilement. De plus, si vous avez besoin de quelque chose de très spécifique, de nombreux tourneurs peuvent fais-le pour toi. La Imprimantes 3D Ils aident également les fabricants à créer leurs propres engrenages.
Calculs de base pour les systèmes de pignons
Comme vous pouvez le voir dans ce GIF, vous devez comprendre que lorsque deux engrenages s'engrènent, les deux axes tournera dans le sens opposé et pas dans le même sens. Comme vous pouvez le voir, si vous regardez la rue rouge dentelée, elle tourne à droite, tandis que la bleue tourne à gauche.
Ainsi, pour qu'un axe tourne dans le même sens il faudrait rajouter une autre roue supplémentaire, comme la verte. De cette façon, le rouge et le vert tournent dans le même sens. En effet, lorsque le bleu est tourné vers la gauche, lors de l'engagement du bleu-vert, le vert inversera à nouveau le sens de rotation, se synchronisant avec le rouge.
Une autre des choses qui peuvent être appréciées dans ce GIF est vitesse de rotation. Si tous les engrenages avaient le même diamètre et le même nombre de dents, tous les arbres tourneraient à la même vitesse. D'autre part, lorsque le nombre de dents/diamètre est modifié, la vitesse est également modifiée. Comme vous pouvez le voir dans ce cas, le rouge est celui qui tourne le plus rapidement, car il a un diamètre plus petit, tandis que le bleu tourne à une vitesse moyenne et le vert est celui qui tourne le plus lentement.
En réponse à cela, il est possible de penser qu'en jouant avec les tailles les vitesses peuvent être modifiées. Vous avez raison, tout comme un vélo peut le faire avec les engrenages ou la boîte de vitesses le fait avec les rapports de vitesse d'une voiture. Et pas seulement cela, vous pouvez également faire des calculs sur la vitesse de rotation.
Lorsque vous avez deux engrenages engrenés, un petit (pignon) et un autre grand (roue), les événements suivants peuvent se produire :
- Si nous imaginons que le moteur ou la traction est appliqué au pignon et que la roue est entraînée, bien que le pignon tourne à grande vitesse, ayant une roue plus grande, il le ralentira, agissant comme un réducteur. Ce n'est que s'ils étaient de la même taille (pignon = roue) que les deux essieux tourneraient à la même vitesse.
- En revanche, si l'on imagine que c'est la roue qui a la traction et qu'une vitesse est appliquée, même si elle est faible, le pignon tournera plus vite, puisque sa petite taille fait office de multiplicateur.
Calculs de transmission à engrenages
Une fois que vous avez compris cela, vous pouvez effectuer les calculs d'un système de transmission simple entre deux vitesses en appliquant le formule:
N1 Z1 = N2 Z2
Où Z est le nombre de dents des engrenages 1 et 2 qui sont en prise et N est la vitesse de rotation des arbres en RPM (tours par minute ou tours par minute). Pour exemple, imaginez que dans le GIF ci-dessus, pour simplifier :
- Rouge (entraînement) = 4 dents et le moteur applique une vitesse de rotation à son arbre de 7 tr/min.
- Bleu = 8 dents
- Vert = 16 dents
Si vous voulez calculer le virage dans ce système, vous devez d'abord calculer la vitesse du bleu :
4 7 = 8 z
z = 4 7/8
z = 3.5 tr/min
C'est-à-dire que l'axe bleu tournerait à 3.5 tr/min, un peu plus lentement que les 4 tr/min de l'axe rouge. Si vous vouliez calculer le virage du vert, maintenant que vous connaissez la vitesse du bleu :
8 3.5 = 16 z
z = 8 3.5/16
z = 1.75
Comme vous pouvez le voir, le vert tournerait à 1.75 tr/min, ce qui est plus lent que le bleu et le vert. Et que se passerait-il si le moteur est situé sur l'axe vert et que la roue motrice tourne à 4 RPM, alors la rotation serait de 8 RPM pour le bleu, 16 RPM pour le rouge.
Il s'ensuit donc que, lorsque la roue motrice est petite, on obtient une vitesse plus faible sur l'arbre final, mais un effort plus important. Dans le cas où c'est la grande roue qui transporte la traction, la petite roue atteint une plus grande vitesse, mais moins de force. Car là puissances ou couple différent? Regardez cette formule :
P = T
Où P est la puissance transmise par l'arbre en watts (W), T est le couple développé (Nm), ω la vitesse angulaire à laquelle l'arbre tourne (rad / s). Si la puissance du moteur est maintenue et que la vitesse de rotation est multipliée ou réduite, alors T. est également modifié.. Il en va de même si T est maintenu constant et la vitesse est modifiée, alors P est modifié.
Vous voudrez probablement aussi calculer si un axe tourne à X tr/min, de combien il avancerait linéairement, c'est-à-dire le vitesse lineaire. Par exemple, imaginez que dans le rouge vous avez un moteur à courant continu et sur l'axe vert vous avez placé une roue pour qu'un moteur se déplace sur une surface. À quelle vitesse irait-il?
Pour cela, il vous suffit de calculer la circonférence du pneu que vous avez installé. Pour ce faire, multipliez le diamètre par Pi et cela vous donnera la circonférence. Sachant de combien la roue peut avancer à chaque tour et en tenant compte de ce qui tourne chaque minute, la vitesse linéaire peut être obtenue...
Ici, je vous montre une vidéo pour que vous puissiez mieux comprendre cela:
Calculs pour vis sans fin et pignon
Quant à vis sans fin et pignon, peut être calculé avec la formule :
i = 1 / Z
En effet, la vis est considérée dans ce système comme un pignon à une seule dent qui a été coupé en hélice. Donc, si vous avez un pignon de 60 dents, par exemple, alors ce sera 1/60 (cela signifie que la vis devrait tourner 60 fois pour que le pignon complète 1 tour). De plus, c'est un mécanisme qui n'est pas réversible comme les autres, c'est-à-dire que le pignon ne peut pas être tourné pour que la vis sans fin tourne, seule la vis sans fin peut être l'arbre d'entraînement ici.
Calculs de crémaillère et pignon
Pour le système Crémaillère, les calculs changent à nouveau, dans ce cas ils sont :
V = (pZN) / 60
Autrement dit, multipliez le pas des dents du pignon (en mètres), par le nombre de dents du pignon et par le nombre de tours du pignon (en tr/min). Et cela est divisé par 60. Par exemple, imaginez que vous ayez un système avec un pignon à 30 dents, un pas de 0.025 m et une vitesse de rotation de 40 tr/min :
V = (0.025) / 30
V = 0.5 m/s
C'est-à-dire qu'il avancerait d'un demi-mètre toutes les secondes. Et, dans ce cas, oui c'est réversibleC'est-à-dire que si la crémaillère est déplacée longitudinalement, le pignon peut être amené à tourner.
Vous pouvez même calculer combien de temps il faudrait pour parcourir une distance en considérant la formule de mouvement de ligne uniforme (v = d / t), c'est-à-dire que si la vitesse est égale à la distance divisée par le temps, alors le temps est effacé :
t = d / v
Par conséquent, connaissant déjà la vitesse et la distance que vous voulez calculer, par exemple, imaginez que vous vouliez calculer combien de temps il faudrait pour parcourir 1 mètre :
t = 1 / 0.5
t = 2 secondes
J'espère vous avoir aidé à acquérir au moins les connaissances les plus essentielles sur les engrenages, afin que vous compreniez comment ils fonctionnent et comment vous pouvez les utiliser à votre avantage dans vos futurs projets.
Pour un fabricant comme moi (heureusement à la retraite), c'est formidable d'avoir des informations claires, concises et complètes sur la façon de concevoir des engrenages et de pouvoir les imprimer. Toutes nos félicitations