
मेक्ट्रोनिक्स एक अनुशासन है जो इलेक्ट्रॉनिक्स के साथ यांत्रिकी को मिलाता है, इंजीनियरिंग की एक बहु-विषयक शाखा होने के नाते जो रोबोटिक्स, इलेक्ट्रॉनिक्स, कंप्यूटिंग, दूरसंचार, नियंत्रण, आदि पर आकर्षित करता है। इलेक्ट्रॉनिक DIY परियोजनाओं से परे जाने के लिए, और mechatronic परियोजनाओं के साथ प्रयोग करना शुरू करें, आप जैसे उपकरणों को एकीकृत करना शुरू कर सकते हैं इंजन ओ एल र्रैखिक गति देने वाला अपने Arduino के लिए।
जो आपको खोलता है संभावनाओं की एक नई दुनिया निर्माताओं के लिए। वास्तव में, यह रैखिक एक्ट्यूएटर मोबाइल क्रियाओं को करने या अन्य तत्वों पर बल लगाने की क्षमता के साथ सबसे अधिक व्यावहारिक है। क्या आपकी और अधिक जानने की इच्छा है? हम आपको बताते हैं ...
रैखिक actuators के प्रकार

कई प्रकार के एक्ट्यूएटर हैं, हालांकि इस लेख में हम उस पर ध्यान केंद्रित करेंगे जो प्लंजर को चलाने के लिए एक इलेक्ट्रिक मोटर का उपयोग करता है। लेकिन आपको पता होना चाहिए कि अन्य प्रकार भी हो सकते हैं:
- जलगति विज्ञान: वे पिस्टन को स्थानांतरित करने के लिए किसी प्रकार के तरल पदार्थ का उपयोग करते हैं। एक उदाहरण कई कृषि मशीनों या उत्खनन करने वालों का हो सकता है, इन पिस्टन और तेल के दबाव का उपयोग करके कृत्रिम हथियार, हाइड्रोलिक प्रेस आदि को स्थानांतरित किया जा सकता है।
- विद्युतीय: वे एक्ट्यूएटर हैं जो आंदोलन को उत्पन्न करने के लिए इलेक्ट्रिक मोटर द्वारा स्थानांतरित किए गए एक अंतहीन स्क्रू का उपयोग करते हैं। इसमें सोलेनोइड प्रकार (इलेक्ट्रोमैग्नेट) भी होते हैं, जो पिस्टन या प्लंजर और एक स्प्रिंग को स्थानांतरित करने के लिए एक चुंबकीय क्षेत्र का उपयोग करते हैं, जब उस क्षेत्र को समाप्त नहीं किया जा रहा होता है। एक व्यावहारिक उदाहरण अंतिम उदाहरण हो सकता है जो मैं इस लेख में प्रस्तुत करता हूं, या कई अन्य रोबोटिक्स, सामान्य यांत्रिक उपकरण आदि।
- टायर: वे हवा का उपयोग तरल पदार्थ के रूप में करते हैं, तरल के बजाय हाइड्रोलिक्स के मामले में। इनमें से एक उदाहरण कुछ शैक्षिक केंद्रों की प्रौद्योगिकी कार्यशालाओं में पाए जाने वाले विशिष्ट रैखिक एक्ट्यूएटर्स हैं।
इस उपकरण का अंतिम लक्ष्य है एक ऊर्जा को बदलना इस मामले में एक रैखिक जोर में हाइड्रोलिक, बिजली या वायवीय, इस प्रकार बल, जोर, एक नियामक के रूप में कार्य करना, कुछ अन्य तंत्र को सक्रिय करना, आदि।
इलेक्ट्रॉनिक रैखिक actuator के बारे में
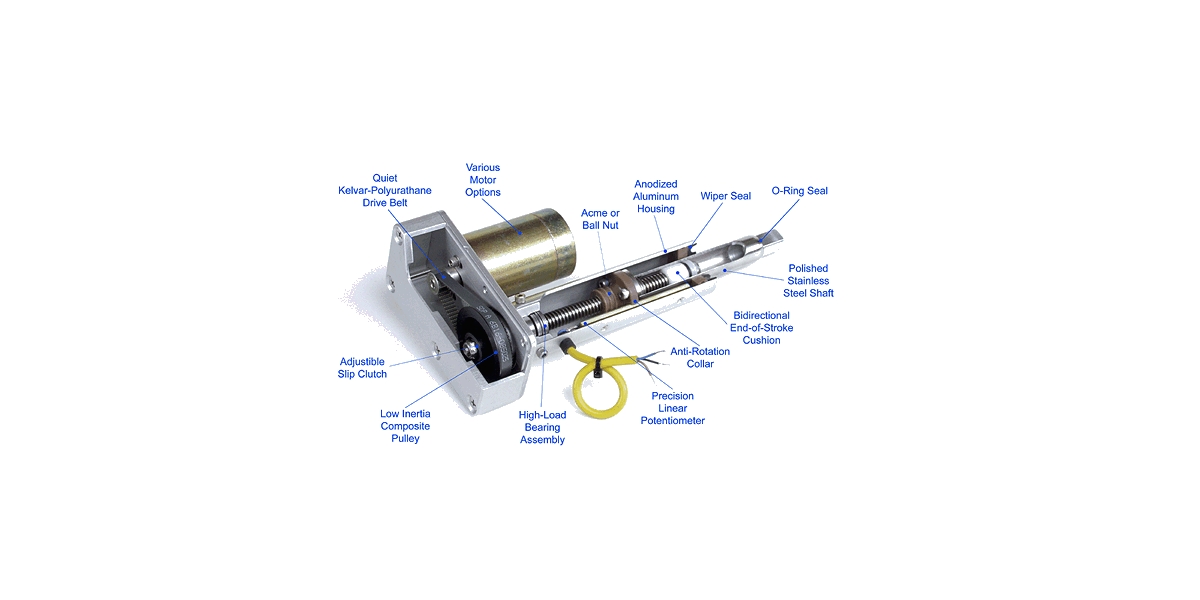
मूल रूप से ए इलेक्ट्रिक लीनियर एक्चुएटर यह कभी-कभी एक इलेक्ट्रिक मोटर से ज्यादा कुछ नहीं होता है एक NEMA हो सकता है जैसा कि पहले ही देखा जा चुका है। यह मोटर अपने शाफ्ट को बदल देती है, और गियर या दांतेदार जंजीरों के संयोजन के माध्यम से यह एक अंतहीन पेंच बन जाएगा। यह अंतहीन पेंच एक दिशा या किसी अन्य में पिस्टन या रॉड को फिसलने के आरोप में होगा (रोटेशन की दिशा के आधार पर)।
कि सवार यह वह होगा जो किसी चीज को खींचने, किसी चीज को खींचने, किसी ताकत को बाहर निकालने आदि के लिए एक एक्ट्यूएटर का काम करता है। एप्लिकेशन काफी विस्तृत हैं। जैसा कि आप देख सकते हैं, यह कुछ काफी सरल है जो बहुत सारे रहस्यों को पकड़ नहीं पाता है।
इन रैखिक एक्ट्यूएटर्स, अन्य गैर-रैखिक लोगों के विपरीत, एक्सर्ट करने में सक्षम होने का लाभ है बड़ी ताकतों और विस्थापन काफी (मॉडल के आधार पर)। लेकिन Arduino के लिए, आपके पास कुछ मॉडल हैं जो 20 से 150 किलोग्राम (किलोग्राम बल या किलोपॉन्ड), और 100 से 180 मिमी के विस्थापन तक जा सकते हैं।
एक बड़ा नुकसान इसके रूप में है विस्थापन का वेगक्योंकि इन भारी ताकतों को बुझाने से, टॉर्क को बढ़ाने के लिए आवश्यक कटौती पहियों के विस्तार और पीछे हटने की गति कम हो जाएगी। ठेठ मॉडल पर 4 से 20 मिमी / एस की गति दी जा सकती है। इसका मतलब है कि पूरी रैखिक प्रक्रिया को पूरा करने के लिए, यह लंबे समय तक और सुस्त होने के मामले में कुछ दर्जन सेकंड से कुछ मिनट तक जा सकता है ...
उसके लिए जैसा भोजन, आप उनके पास विभिन्न वोल्टेज या वोल्टेज हैं। उदाहरण के लिए, सामान्य यह है कि वे 12 या 24v हैं, हालांकि आप कुछ नीचे और ऊपर पा सकते हैं। उनके उपभोग के लिए, वे कुछ मामलों में 2 ए से लेकर 5 ए तक हो सकते हैं। जैसा कि आप देख सकते हैं, एक शक्तिशाली इंजन होने के नाते, खपत अधिक है ... इसलिए यदि आप इसे खिलाने की योजना बनाते हैं बैटरी के साथ, आपको यह विचार करना चाहिए कि उनके पास आवश्यक क्षमता है।
रैखिक actuator नियंत्रण
Arduino के लिए आप जो इलेक्ट्रिक लीनियर एक्ट्यूएटर पा सकते हैं, वह विभिन्न प्रकार के हो सकते हैं नियंत्रण:
- पोटेंशियोमीटर के साथ: एक पोटेंशियोमीटर के माध्यम से वे पिस्टन की स्थिति का चयन करने की अनुमति देते हैं।
- करियर के अंत के साथ: प्रत्येक छोर पर एक सीमा स्विच शीर्ष पर पहुंचने के बाद इसे अपने आप बंद कर देगा।
- नियंत्रण से बाहर: उनके पास उपरोक्त नियंत्रण प्रणाली में से कोई भी नहीं है।
बाहर पिन
El बाहर पिन एक रेखीय actuator सरल नहीं हो सकता है। इलेक्ट्रिक मोटर को खिलाने के लिए इसमें दो प्रवाहकीय केबल होते हैं, जो इसे एकीकृत करता है, और इससे अधिक कुछ नहीं। इसलिए, शून्य जटिलताओं। स्टेम को बढ़ाने या वापस लेने के लिए ध्यान में रखने वाली एकमात्र बात यह है कि मोटर का घुमाव उल्टा होना चाहिए (वर्तमान ध्रुवता)।
इसके लिए आप संभव हो सकते हैं एक एच-पुल नियंत्रक का उपयोग करें जैसे प्रत्यक्ष करंट मोटर्स के लिए उपयोग किया जाता है। आप सोच सकते हैं कि उसके जैसा कोई आपकी सेवा करता है L298N, यू दूसरों देखा, जैसे कि TB6612FNG, आदि। लेकिन सच्चाई यह है कि उनमें से किसी के पास इन रैखिक actuators (यदि वे बड़े हैं) के लिए पर्याप्त शक्ति नहीं है। इसलिए, नियंत्रक जल जाएगा।
इसलिए, आप केवल निर्माण कर सकते हैं अपनी गति नियंत्रण BJTs या MOSFETs जैसे ट्रांजिस्टर का उपयोग करना, और यहां तक कि रिले ठोस अवस्था ...
लीनियर एक्चुएटर कहाँ से खरीदें?
El कीमत लीनियर एक्ट्यूएटर काफी हद तक आकार, गति, लम्बाई और उस बल पर भी निर्भर करेगा जो वह झेल सकता है। आप आमतौर पर उन्हें € 20 से € 200 तक पा सकते हैं। और आप उन्हें विशेष इलेक्ट्रॉनिक्स स्टोर या अन्य ऑनलाइन स्टोर जैसे अमेज़न में आसानी से पाएंगे। उदाहरण के लिए:
- सोर्सिंगमैप सोलनॉइड एक्ट्यूएटर 400g और 4 मिमी के बल को निकालने में सक्षम है
- Justech DC 12V लीनियर एक्चुएटर 72kg तक और 150mm यात्रा करता है
- एलएचक्यू-मुख्यालय डीसी 12 वी 80 किलोग्राम और यात्रा के 50 मिमी की क्षमता के साथ
- सीफ्रंट 12V अप करने के लिए 300 मिमी और 150 किलो वजन समर्थित (50 मिमी के लिए अनुमानित)
- कोई उत्पाद नहीं मिला।
इन उत्पादों में से कई के खिलाफ संरक्षित हैं धूल और छींटे IPX54 प्रमाणपत्र द्वारा। और निर्माता की सिफारिशों को ध्यान में रखें, संकेतित वज़न हमेशा सभी एक्सटेंशन लंबाई के लिए समर्थित नहीं होते हैं, कुछ मामलों में एक निश्चित सीमा तक केवल एक निश्चित सीमा वजन का समर्थन किया जाता है।
Arduino के साथ एकीकरण
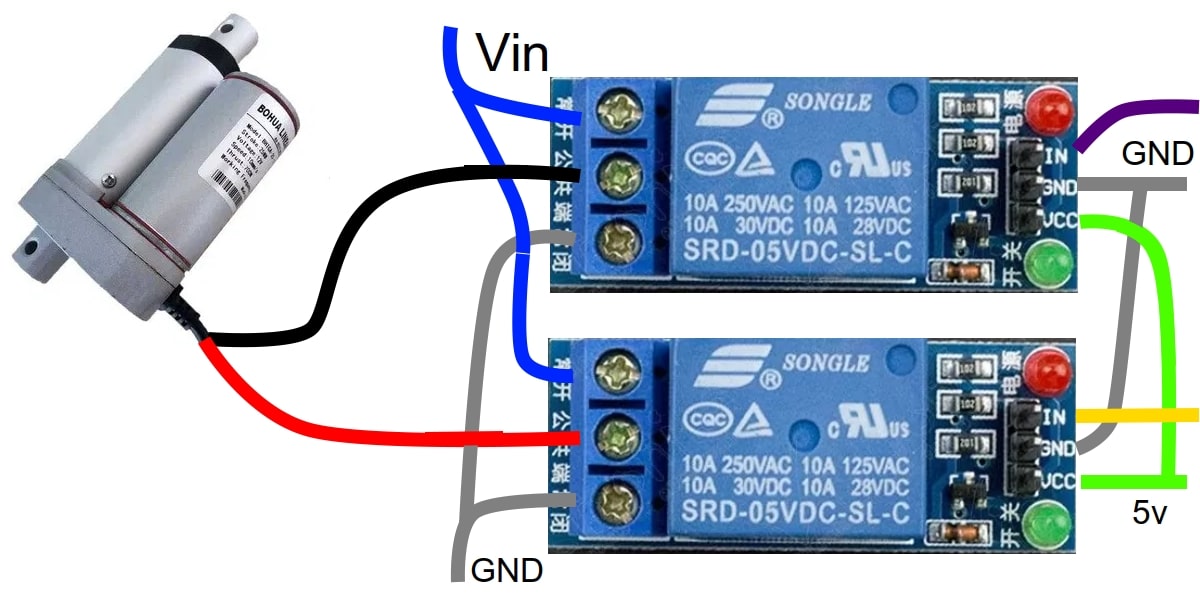
यदि आप उन्हें अपने Arduino बोर्ड के साथ एकीकृत करते हैं तो इस प्रकार के एक्ट्यूएटर्स के विभिन्न व्यावहारिक उपयोग हो सकते हैं। ऐसा करने के लिए, आपको सबसे पहले पता होना चाहिए कि वह तरीका है जिसमें आप कर सकते हैं कनेक्शन आरेख बनाएं अपने बैज के साथ। जैसा कि आप देख सकते हैं, यह बिल्कुल भी जटिल नहीं है, इसलिए यह बहुत अधिक जटिलता पेश नहीं करता है।
जैसा कि आप उपर्युक्त योजनाबद्ध से देख सकते हैं कि मैंने तैयार किया है, मैंने दो रिले और एक रैखिक एक्ट्यूएटर का उपयोग किया है। रंगीन रेखाएँ आप निम्नलिखित का प्रतिनिधित्व करते हैं:
- लाल और काला: लीनियर एक्चुएटर के केबल होते हैं जो उपयोग किए गए प्रत्येक रिले में जाएंगे।
- ग्रिस: आप प्रत्येक रिले में जमीन या जीएनडी से जुड़े हुए हैं जैसा कि आप देख सकते हैं।
- Azul: यह रिले के लिए बिजली की आपूर्ति विन को जाता है, इस मामले में यह 5v और 12v के बीच होगा।
- हरा: मॉड्यूल की Vcc लाइनें आपके Arduino बोर्ड के 5v से जुड़ी हैं।
- ग्रिस: जमीन भी, मॉड्यूल से Arduino GND से जुड़ी।
- बैंगनी और नारंगी: नियंत्रण रेखाएं हैं जो स्पिन को नियंत्रित करने के लिए किसी भी Arduino पिन में जाएगी। उदाहरण के लिए, आप D8 और D9 पर जा सकते हैं।
के उदाहरण के लिए अपने Arduino आईडीई के लिए स्रोत कोडबुनियादी नियंत्रण के लिए स्केच इस प्रकार होगा:
//configurar las salidas digitales
const int rele1 = 8;
const int rele2 = 9;
void setup()
{
pinMode(rele1, OUTPUT);
pinMode(rele2, OUTPUT);
//Poner los relés a bajo
digitalWrite(rele1, LOW);
digitalWrite(rele2, LOW);
}
void loop()
{
extendActuator();
delay(2000);
retractActuator();
delay(2000);
stopActuator();
delay(2000);
}
//Activar uno de los relés para extender el actuador
void extendActuator()
{
digitalWrite(rele2, LOW);
delay(250);
digitalWrite(rele1, HIGH);
}
//Lo inverso a lo anterior para retraer el émbolo
void retractActuator()
{
digitalWrite(rele1, LOW);
delay(250);
digitalWrite(rele2, HIGH);
}
//Poner ambos releś apagados parar el actuador
void stopActuator()
{
digitalWrite(rele1, LOW);
digitalWrite(rele2, LOW);
}
आप कोड को संशोधित करें यदि आप चाहते हैं, या अधिक तत्वों को जोड़ने के लिए विशिष्ट पदों पर सवार को नियंत्रित और स्थिति में रखने में सक्षम हो ...