
Egyes projektjeiben szükség lesz a távolságok mérésére. Nos, tudnia kell, hogy a A VL53L0X olyan eszköz, amely lehetővé teszi nagy pontosságú mérést. Ezenkívül kis mérete és alacsony ára ideális a barkácsolási projektjeihez, különösen az Arduino-val való integrációhoz.
Sok olyan eszköz van, amely képes mérni a távolságokat, közülük néhány olyan távolságmérő, amely ultrahang alapján hangot bocsát ki, és amikor az objektummal ugrál, kellő pontossággal megismeri a meglévő távolságot. De ha a legnagyobb pontosságot akarja, ehhez a optikai távolságmérő. Az ilyen típusú mérőeszközök lézeren alapul, mint a VL53L0X esetében.
Mi az a ToF?
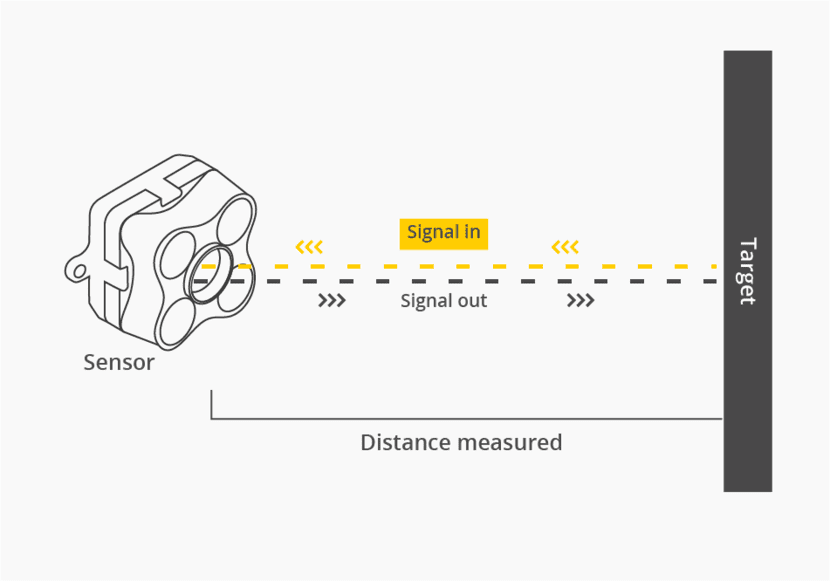
Repülési idő vagy ToF (Repülési idő) kamera ez a távolságok mérésére szolgáló technika. Optikán alapul, a fénysugár emissziója és annak vétele között eltelt idő mérésével. Lehetnek CCD, CMOS érzékelők, és az impulzusok lehetnek infravörös, lézeres stb. A rendszer szinkronizálja az időmérés megkezdését éppen akkor, amikor az impulzus beindul, és leállítja a számlálót, amikor megkapják a visszapattanást az érzékelőtől.
Ily módon a távolság elég pontosan kiszámítható. Csak egy további, a chipbe integrált logikai áramkörre van szükség a számítások elvégzéséhez a sugár kilövésétől a befogadásáig, és ezáltal meghatározza a távolságot. Az elv elég egyértelmű.

Ezt a típusú eszközt használják robotika lehetővé teszi, hogy a robot vagy a drón elkerülje az akadályokat, megtudja, milyen messze vannak a céltól, észlelje a mozgást vagy a közelséget, a különböző alkalmazásokhoz használt autóérzékelők számára, elektronikus mérőeszközt, például működtetőt valósítson meg, hogy Arduino tegyen valamit, amikor egy tárgy bizonyos közelségét észleli stb.
Mi a VL53L0X és az adatlap
El A VL53L0X ezt az elvet használja a lézeres infravörös távolságok mérésére. utolsó generáció. Egy olyan processzorral együtt, mint az Arduino, hatékony eszköz lehet a méréshez. Pontosabban, a chip képes 50 mm és 2000 mm, azaz 5 centiméter és 2 méter közötti távolságokat megragadni.
A közelebbi távolságok méréséhez valószínűleg szüksége van ennek a chipnek a VL6180X nevű változatára, amely lehetővé teszi 5 és 200 mm, azaz fél centiméter és 20 centiméter közötti tartomány mérését. Ha bármilyen hasonló okból szeretne hasonló, de ultrahang alapú eszközt találni, akkor érdemes megnéznie a HC-SR04-et, egy másik meglehetősen olcsó, a gyártók körében népszerű modult.
El VL53L0X chip úgy tervezték akkor is működik, ha a környezeti fény elég magas. Ne feledje, hogy az optikai munkavégzés során minél nagyobb a környezet fényszennyezése, annál nehezebb megfelelő módon megragadni a jel visszapattanását. De ebben az esetben nem jelent túl sok problémát. Ezenkívül az integrált kompenzációs rendszer lehetővé teszi a mérést akkor is, ha védőüveg mögött használja.
Ettől lesz egy a legjobb távolságérzékelők közül hogy megtalálja a piacon. Sokkal nagyobb pontossággal, mint az ultrahang vagy infravörös (IR) alapú érzékelők. Az ilyen pontosság oka az, hogy a lézert nem befolyásolják a tárgyak visszhangjai vagy visszaverődése, mint a többi esetben.
Jelenleg öszvérekbe integrálva, némi extra összeggel, körülbelül 16 euróért, vagy egyszerűbb lemezekben, amelyek valamivel több, mint 1 euró vagy más esetben 3 euró. Már tudja, hogy olyan üzletekben talál, mint az eBay, az AliExpress, az Amazon stb. Ezeknek az eszközöknek a gyártói különbözőek, ezért ha meg kell ismernie a megvásárolt modell részleteit, a legjobb, ha megnézi a gyártó adatlapja hogy te választottad. Például:
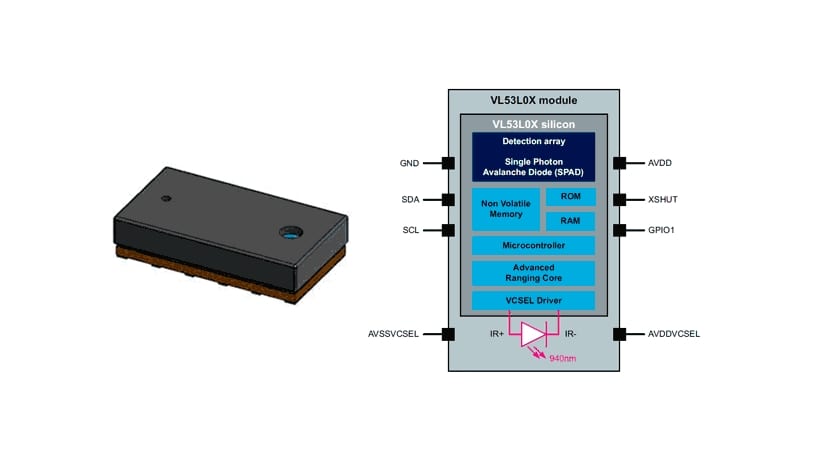
El VL53L0X A chipen belül van a lézerimpulzus-sugárzó és az érzékelő a visszatérő sugár megfogására. Ebben az esetben az emitter 940 nm hullámhosszú lézer és VCSEL típusú (függőleges üregű felületet kibocsátó lézer). Ami a rögzítési érzékelőt illeti, ez egy SPAD (Single Photon Avalanche Diodes). Beépíti a FlightSenseTM nevű belső elektronikát is, amely kiszámítja a távolságot.
El mérési szög vagy FOV (látómező) ebben az esetben 25º. Ez 0,44 m átmérőjű mérési területet jelent 1 m távolságban. Bár a mérési tartomány a környező körülményektől függ. Ha beltéren végezzük, akkor valamivel magasabb, mint a szabadban. Ez függ a mutatott objektum tükröződésétől is:
| Célvisszaverődés | Feltételek | belső | Külső |
|---|---|---|---|
| Fehér célpont | Tipikus | 200cm | 80cm |
| Utánzó | 120cm | 60cm | |
| Szürke cél | Tipikus | 80cm | 50cm |
| mínimo | 70cm | 40cm |
Ezenkívül a VL53L0X-nek több is van üzemmódok amelyek eltérhetnek az eredményektől. Ezeket a módokat a következő táblázat foglalja össze:
| Modo | Időzítés | terület | Pontosság |
|---|---|---|---|
| alapértelmezés szerint | 30ms | 1.2m | Lásd az alábbi táblázatot |
| Nagy pontosság | 200ms | 1.2m | + / - 3% |
| Hosszú távú | 33ms | 2m | Lásd az alábbi táblázatot |
| Magassebesség | 20ms | 1.2m | + / - 5% |
E módok szerint többünk van szabványos és nagy hatótávolságú pontosság amit ebben a táblázatban tartalmaz:
| belső | Külső | |||||
|---|---|---|---|---|---|---|
| Célvisszaverődés | távolság | 33ms | 66ms | távolság | 33ms | 66ms |
| Fehér célpont | 120 cm-nél | 4% | 3% | 60 cm-nél | 7% | 6% |
| Szürke cél | 70 cm-nél | 7% | 6% | 40 cm-nél | 12% | 9% |
Pinout és csatlakozás
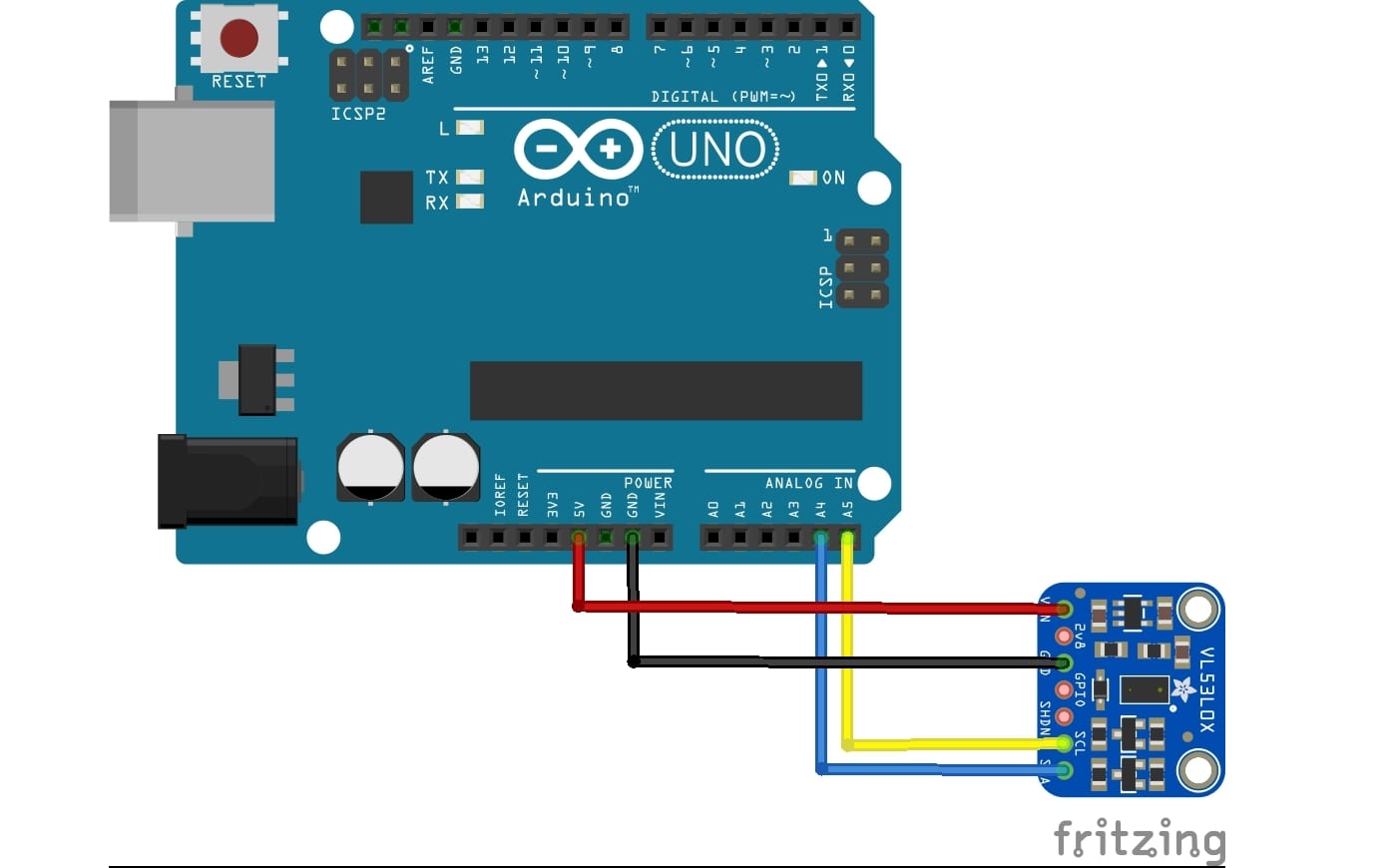
Ahhoz, hogy mindez megfelelően működjön, szüksége van interfész a külvilággal. Ez pedig bizonyos csapok vagy csatlakozások révén valósul meg. A VL53L0X kivezetése meglehetősen egyszerű, csak 6 tűvel rendelkezik. Az Arduino-val való integrációja érdekében a kommunikáció az I2C-n keresztül valósulhat meg.
Etetni, akkor lehet csatlakozzon csapokhoz Így:
- VCC-től 5v-ig az Arduino-tól
- Arduino GND – GND
- SCL egy Arduino analóg csapra. Például A5
- SDA egy másik analóg csapra. Például A4
- A GPI01 és az XSHUT csapokat jelenleg nem kell használni.
Integráció az Arduinóval
Sok más modulhoz hasonlóan a VL53L0X esetében könyvtárak is vannak (pl Adafruit) a rendelkezésre álló kód, amelyet használhat bizonyos funkciók használatához írás közben a forráskód a projekt Arduino IDE-ben történő kezeléséhez. Ha ez az első alkalom az Arduino-val, ajánlom programozási kézikönyvünk.
Példa a Egyszerű kód a mérések elvégzéséhez és a mérési érték megjelenítéséhez a soros porton keresztül így láthatja a számítógép képernyőjén, miközben az Arduino kártya csatlakoztatva van:
#include "Adafruit_VL53L0X.h"
Adafruit_VL53L0X lox = Adafruit_VL53L0X();
void setup() {
Serial.begin(9600);
// Iniciar sensor
Serial.println("VL53L0X test");
if (!lox.begin()) {
Serial.println(F("Error al iniciar VL53L0X"));
while(1);
}
}
void loop() {
VL53L0X_RangingMeasurementData_t measure;
Serial.print("Leyendo sensor... ");
lox.rangingTest(&measure, false); // si se pasa true como parametro, muestra por puerto serie datos de debug
if (measure.RangeStatus != 4)
{
Serial.print("Distancia (mm): ");
Serial.println(measure.RangeMilliMeter);
}
else
{
Serial.println(" Fuera de rango ");
}
delay(100);
}
Az Adafruit saját könyvtárában van több felhasználási példa, ha szüksége van rá ...