
いくつかのタイプがあります 電気モーターとして ステッパー、またはステッピングモーター、そして、 サーボモーター。 後者の中には、次のようないくつかの本当に興味深いモデルがあります サーボSG90の場合。 最初のプロジェクト、このタイプのデバイスでの練習、学習、単純なロボット制御などに理想的なサーボ。 また、その電力要件は非常に低く、 エイドリアンプレート またはPCのUSBポートから5vに。
マイクロサーボSG90とは?

SG90サーボはミニチュアサーボです。 非常にコンパクトな寸法 スペースが重要なプロジェクトに統合できるようにする。 さらに、経済的で使いやすく、エネルギー需要が非常に少ないため、組み込み、IoT、またはその他の低消費アプリケーションで使用することもできます。
サーボSG90に関しては、このサーボモーターは含まれています ユニバーサルタイプSコネクタ これは、ほとんどの商用デバイスに適合します。 これは、それぞれが何に使用されるかを識別する色の3本のワイヤーで構成されています。
- ロホ:は正の電源ケーブルまたはVcc(+)です
- ブラウン:は電源ケーブルのマイナス(-)またはGND(アース)です
- オレンジ:サーボモータを制御するためのPPM(パルス位置変調)信号を伝送するケーブルです
一部のモデルは、色の構成も備えている場合があります 黒-赤-白、この場合のスキームは、それぞれGND-Vcc-PPM信号になります。
SG90サーボ機能
に対する 技術的特徴 このサーボモーターの中で、サーボSG90は次の点で際立っています。
- サポートされている重量:1.2〜1.6 Kg(小さいサイズで十分)
- 4.8vでのモータートルク:1.2kg / cm
- 動作電圧:4 – 7.2v
- 4.8vでのスピン速度:0.12秒/60º
- アングロデロタシオン:120º
- Rango detemperatura de funcionamiento:-30ºCおよび+60ºC
- 大きさ:22×11.5×27 mm
- 重量:ケーブルとコネクタを含めて9gまたは10.6g
- Arduino互換: はい
- Conectorユニバーサル:ほとんどのラジコン受信機(双葉、JR、GWS、Cirrus、Hitec、…)と互換性があります
あなたも見つけるでしょう サーボSG90のいくつかの変種、のように:
- MG90S:SG90と同様ですが、金属製のギアとリンケージを備えているため、最大1.8kgまでサポートできます。
- MG996R:サイズは少し大きいですが、15Vで供給した場合は最大6 Kg、13Vで供給した場合は4.8Kgをサポートできます。
詳しくは - データシートをダウンロード
このようなサーボモーターモデルを低価格で購入する場所
このタイプのサーボSG90サーボモーターを購入したい場合は、いくつかの専門の電気店またはAmazonプラットフォームで見つけることができます。 例えば、 これらのおすすめ商品:




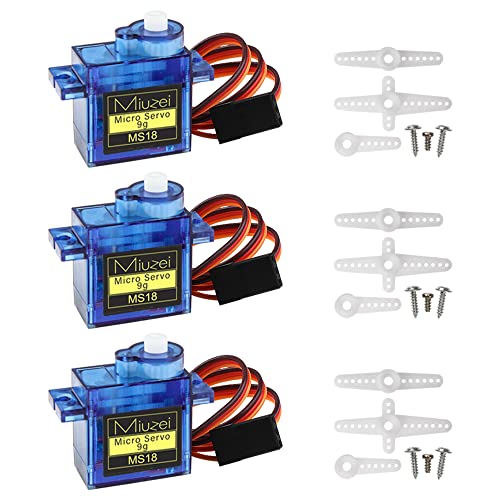

ご覧のとおり、 彼らは非常に安いです、および複数を必要とするロボットやその他のプロジェクト用に、それらをばらばらに購入することも、パックで購入することもできます。 さらに、一部のパックには、ブレード、ネジなどの特定の追加アクセサリが含まれています。
に対する バリアント 上で引用した、あなたはこれらを持っています:
さて、あなたが探しているのが より強力で堅牢なサーボモーター、より大きな負荷とより大きなトルクに耐えることができる場合は、コンパクトでありながら高性能な他のものもあります。
- 金属歯車を備え、最大20Kgの重量をサポートするQuimatサーボ
- 軸上で最大35kgの荷重をサポートできるServoInnovateking
- 最大60kgをサポートできるステンレス鋼ギアを備えたANNIMOSサーボ
- ステンレス鋼の歯車を備え、最大75KgをサポートできるSHYEKYOサーボ。
Arduinoでの使用方法
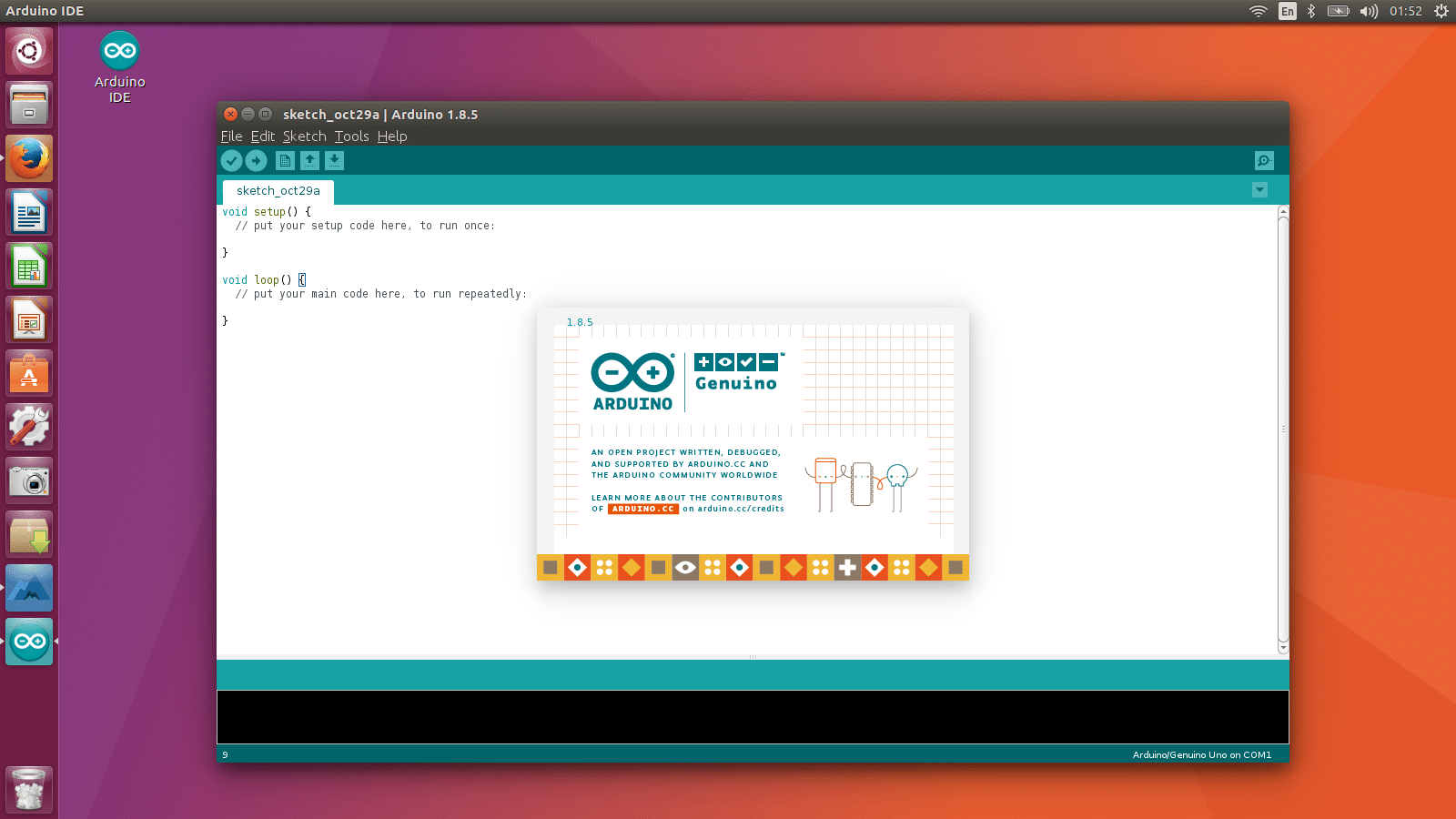
SG90 Servosがどのように機能するかを理解し始めることができるように、ArduinoIDEのスケッチの例を示すためにここに実際のケースがあります。 しかし、最初に、あなたがどのようにすべきかを見てみましょう サーボをArduinoボードに接続します:
- Vccの:外部電源またはArduinoの5Vコネクタに接続する必要があります。 複数の電源を使用する場合は、問題を回避するために、常にアースまたはGNDを共通に配置することを忘れないでください。
- GND:ArduinoボードのGNDに接続できます。
- PPM信号:Arduinoの任意のPWMピンに移動できます。 たとえば、スケッチのD11に。
見るために サンプルソースコード、好きなように試して変更することができますが、IDEで見ることができる独自の例が両方ともあります。 Servo.hライブラリ、この他のように:
#include <Servo.h>
Servo myservo; //Crear el objeto servo
int pos = 0; //Posición inicial del servo SG90
void setup() {
myservo.attach(11); //Vincular el pin 11 de Arduino al control del Servo SG90
}
void loop() {
//Cambia la posición de 0º a 180º, en intervalos de 25ms
for (pos = 0; pos <= 180; pos += 1)
{
myservo.write(pos);
delay(25);
}
//Vuelve desde 180º a 0º, con esperas de 25ms
for (pos = 180; pos >= 0; pos -= 1)
{
myservo.write(pos);
delay(25);
}
}
詳しくは - Arduinoプログラミングマニュアルをダウンロード