롯 기어 아날로그 시계에서 차량 엔진, 기어 박스, 로봇, 프린터 및 기타 여러 메카 트로닉 시스템을 통해 현재 다양한 메커니즘에 있습니다. 덕분에 전송 시스템을 만들 수 있고 이동 전송을 넘어서 변경할 수도 있습니다.
따라서 그들은 매우 중요한 요소입니다 그들이 어떻게 작동하는지 알아야합니다 바르게. 이렇게하면 프로젝트에 적합한 기어를 사용하고 작동 방식을 더 잘 이해할 수 있습니다.
기어 란?

체인 시스템, 풀리 시스템, 마찰 휠 등이 있습니다. 그들 모두 전송 시스템 장점과 단점이 있습니다. 그러나 그중에서도 일반적으로 속성이 가장 좋아하는 기어 시스템이 눈에.니다.
- 마찰 휠이나 풀리에서 발생할 수있는 것처럼 이빨로 인해 미끄러지지 않고 큰 힘을 견딜 수 있습니다.
- 양방향으로 동력이나 움직임을 전달할 수있는 가역 시스템입니다.
- 그들은 매우 정밀한 움직임 제어를 가능하게합니다. 스테퍼 모터예를 들면.
- 체인이나 풀리 앞에 소형 전송 시스템을 만들 수 있습니다.
- 다른 크기를 결합하여 각 축의 회전을 방해 할 수 있습니다. 일반적으로 두 개의 스프라켓을 사용하는 경우 큰 기어를 휠과 작은 피니언이라고합니다.
Un 기어 또는 톱니 바퀴 그것은 기어의 유형에 따라 외부 또는 내부 가장자리에 일련의 톱니가 새겨진 휠 유형에 지나지 않습니다. 이 스프로킷은 회전 운동을하여 부착 된 샤프트에 토크를 생성하고, 함께 그룹화하여 톱니를 함께 맞추는 더 복잡한 기어 시스템을 생성 할 수 있습니다.
당연히 가능하려면 치아의 종류와 크기 일치해야합니다. 그렇지 않으면 호환되지 않고 맞지 않습니다. 이러한 매개 변수는 다음 섹션에서 설명합니다.
기어 부품
두 개의 기어가 서로 맞 물리려면 직경과 톱니 수가 달라질 수 있지만 기어를 구성하는 일련의 요소를 고려해야합니다. 서로 양립하다, 사용하는 치아 유형, 치수 등
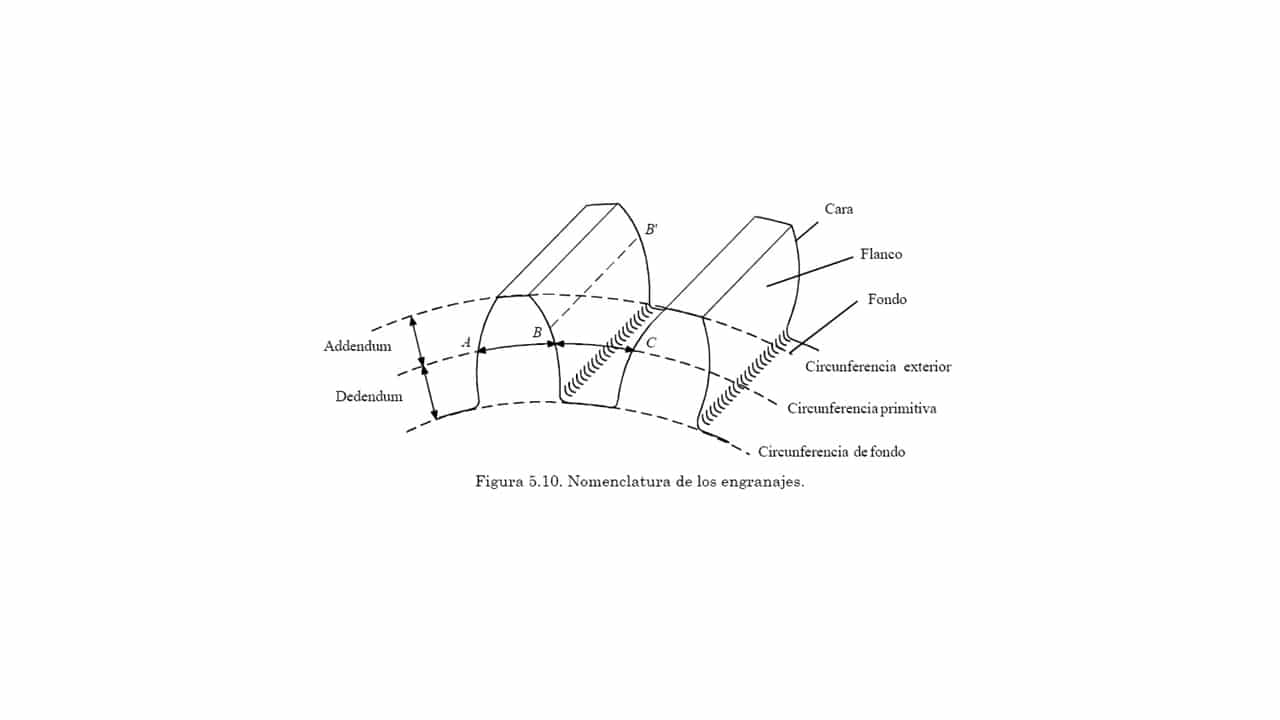
이전 이미지에서 볼 수 있듯이 여러 부분 기어에서 알아야 할 사항 :
- 격막 또는 팔: 무브먼트를 전달하기 위해 크라운과 큐브를 결합시키는 역할을하는 부분입니다. 그들은 다소 두꺼울 수 있으며 그 구성과 강도는 강도와 무게에 크게 좌우됩니다. 때로는 무게를 줄이기 위해 일반적으로 구멍을 뚫고 다른 경우에는 단단한 파티션을 선택합니다.
- 입방체: 이동 전달 축이 부착되어 칸막이에 부착되는 부분입니다.
- 코로나: 톱니가 절단 된 기어 영역입니다. 장비의 호환성, 동작 및 성능이 그것에 달려 있기 때문에 가장 중요합니다.
- 이: 크라운의 이빨 또는 돌출부 중 하나입니다. 치아는 여러 부분으로 나눌 수 있습니다.
- 크레 스타: 치아의 바깥 부분 또는 끝입니다.
- 얼굴과 옆구리: 톱니 측면의 상부와 하부, 즉 맞 물리는 두 개의 기어 휠 사이의 접촉면입니다.
- 발레: 치아의 아랫 부분 또는 두 치아 사이의 중간 영역으로, 맞 물리는 다른 톱니 바퀴의 볏이 수용됩니다.
이 모든 것이 일련의 크라운 기하학 기어의 유형과 속성을 구별합니다.
- 뿌리 둘레: 치아의 계곡이나 바닥을 표시합니다. 즉, 기어의 내경을 구분합니다.
- 원시 원주: 치아 측면의 두 부분 인 얼굴과 옆구리 사이의 분할을 설정합니다. 다른 모든 매개 변수가이를 기반으로 정의되기 때문에 매우 중요한 매개 변수입니다. 치아를 dedendum과 addendum의 두 부분으로 나눕니다.
- 치아 발 또는 dedendum: 원래 원주와 치근 원주 사이에있는 치아의 아래쪽 영역입니다.
- 치아 머리 또는 부록: 원래 원주와 외부 원주에서 이어지는 치아의 윗부분.
- 머리 둘레-톱니의 볏, 즉 기어의 외경을 표시합니다.
상상할 수 있듯이 크라운, 직경 및 치아 유형에 따라 기어 변경 따라 :
- 치아 수: 기어비를 정의하며 변속기 시스템에서 동작을 결정하는 가장 중요한 매개 변수 중 하나입니다.
- 치아 높이: 계곡에서 능선까지의 총 높이.
- 원형 단계: 치아의 한 부분과 다음 치아의 같은 부분 사이의 거리. 즉, 치아가 얼마나 멀리 떨어져 있는지도 숫자와 관련이 있습니다.
- 두께: 기어의 두께입니다.
기어 응용
라스 기어 응용 이전에 이미 언급했듯이 많은 것이 있습니다. 실용적인 응용 프로그램 중 일부는 다음과 같습니다.
- 차량 기어 박스.
- 회전 제어를위한 스테퍼 모터.
- 유압 폭탄.
- 회전 또는 이동 전달 요소와 같은 모든 종류의 엔진.
- 차동 메커니즘.
- 헤드 또는 롤러를 이동하는 프린터.
- 움직이는 부품 용 로봇.
- 산업 기계.
- 아날로그 시계.
- 기계 부품이있는 가전 제품.
- 움직이는 부품이있는 전자 장치.
- 도어 개방 모터.
- 모바일 장난감.
- 농장 기계.
- 항공학.
- 에너지 생산 (바람, 열, ...).
- 등
Arduino, 로봇 등을 사용하여 프로젝트를위한 여러 다른 애플리케이션을 생각할 수 있습니다. 많은 메커니즘을 자동화하고 속도 등으로 재생할 수 있습니다.
기어의 종류
톱니와 기어 자체의 특성에 따라 다른 유형의 기어 각각 장단점이 있으므로 각 응용 프로그램에 적합한 것을 선택하는 것이 중요합니다.
롯 가장 일반적인 유형 위치 :
- 원통형: 평행 축에 사용됩니다.
- 직진: 고속이 아닌 단순한 기어가 필요할 때 가장 일반적으로 사용됩니다.
- 나선형: 이전 버전보다 다소 고급 버전입니다. 그들에서 치아는 실린더 (단일 또는 이중) 주위의 평행 나선 경로로 배열됩니다. 그들은 더 조용하고, 더 빠른 속도로 작동하며, 더 많은 전력을 전달할 수 있으며, 더 균일하고 안전한 움직임을 갖는 것과 같이 직선보다 분명한 이점이 있습니다.
- 원추형: 90º에서도 서로 다른 각도로 배치 된 축 사이의 움직임을 전달하는 데 사용됩니다.
- 직진: 직선형 치아를 사용하고 직선형 원통형 치아와 특성을 공유합니다.
- 나선:이 경우 헬리컬처럼 더 높은 속도와 힘을 지원합니다.
- 내부 기어: 바깥쪽에 이빨이나 왕관을 새기는 대신 안쪽에 있습니다. 일반적으로 사용되지는 않지만 특정 애플리케이션에도 사용됩니다.
- 플라네타륨: 다른 작은 기어가 회전하는 중앙 기어가있는 특정 전송 시스템에 사용되는 기어 세트입니다. 그것이 궤도를 도는 것처럼 보이기 때문에 그 이름을 가진 이유입니다.
- 끝없는 나사: 일부 산업 또는 전자 메커니즘에서 일반적인 기어입니다. 톱니가 나선형으로 절단 된 기어를 사용합니다. 진동이나 소음없이 매우 일정한 속도를 생성합니다. 축이 끝없는 나사에 비스듬히있는 직선 톱니 바퀴로 전달할 수 있습니다.
- 랙 및 피니언: 일부 메커니즘에서도 일반적이며 축의 회전 운동을 선형 운동으로 또는 그 반대로 변환 할 수있는 기어 세트입니다.
당신이 참석한다면 그의 구성, 다음과 같은 재료를 구별 할 수도 있습니다.
- 궤조그들은 일반적으로 다른 유형의 강철, 구리 합금, 알루미늄 합금, 주철 또는 회주철, 마그네슘 합금 등으로 만들어집니다.
- Plásticos: 전자 제품, 장난감 등에 사용 이들은 폴리 카보네이트, 폴리 아미드 또는 PVC 기어, 아세탈 수지, PEEK 폴리 에테르 에테르 케톤, 폴리 테트라 플루오로 에틸렌 (PTFE) 및 액정 폴리머 (LCP)입니다.
- 우드: 오래된 메커니즘이나 특정 장난감에서만 일반적이지 않습니다.
- 다른 사람: 매우 특정한 경우에 다른 섬유 나 특정 재료가 사용될 가능성이 있습니다.
기어는 어디서 살 수 있나요?
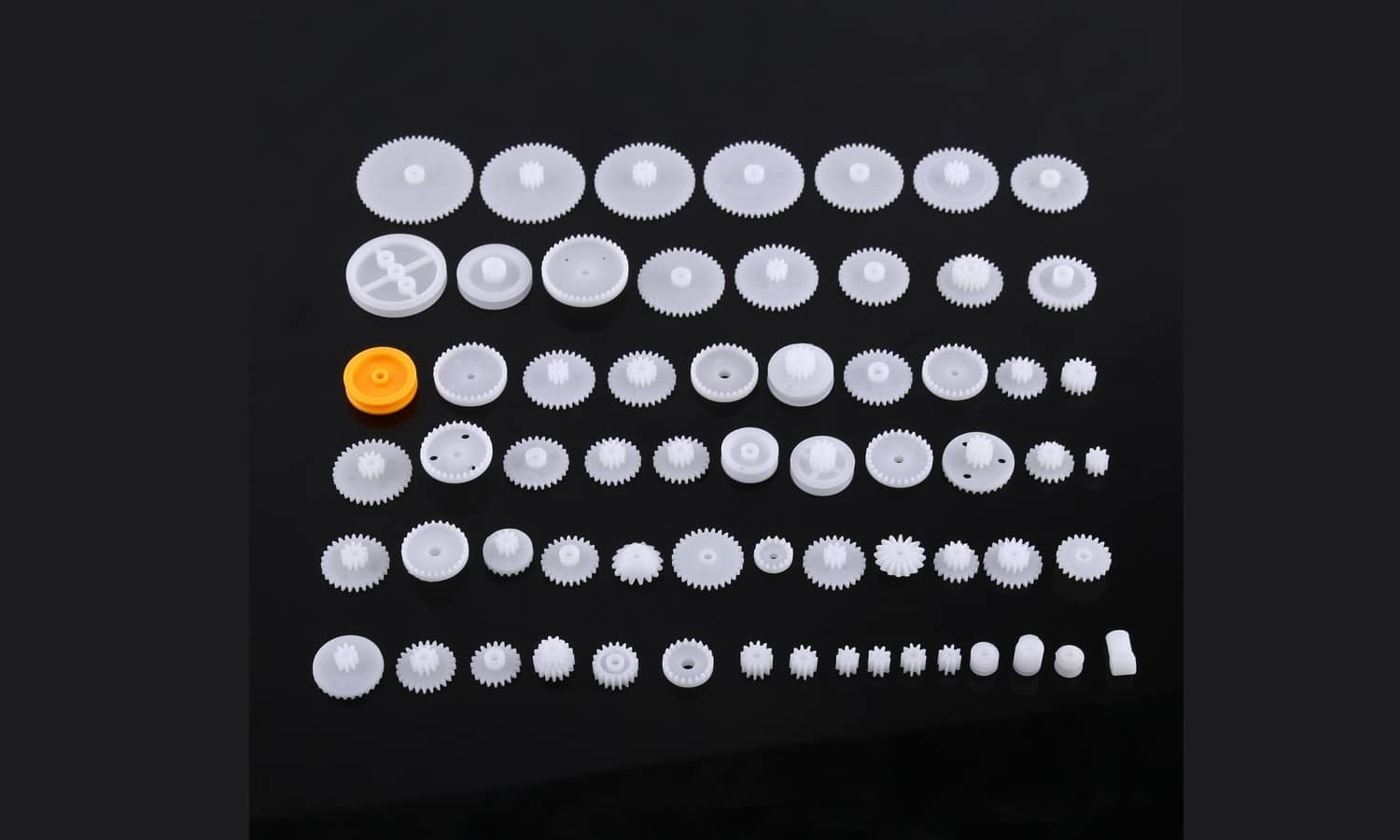
너 다른 유형의 기어 찾기 많은 기계 또는 전자 상점에서. 예를 들어, 다음은 몇 가지 예입니다.
이러한 제품은 크기가 작기 때문에 더 큰 기어가 필요하면 쉽게 찾을 수 없을 것입니다. 또한 매우 구체적인 것이 필요한 경우 많은 터너 워크숍에서 당신을 위해 만들어. 3D 프린터 그들은 또한 제작자가 자신의 기어를 만들도록 돕고 있습니다.
스프로킷 시스템의 기본 계산
이 GIF에서 볼 수 있듯이 두 개의 기어가 맞 물릴 때 두 축이 반대 방향으로 회전합니다 같은 의미가 아닙니다. 보시다시피 빨간색 들쭉날쭉 한 거리를 보면 오른쪽으로, 파란색은 왼쪽으로 회전합니다.
따라서, 축이 같은 방향으로 회전하도록 녹색과 같은 추가 휠을 추가해야합니다. 이렇게하면 빨간색과 녹색이 같은 방향으로 회전합니다. 이는 파란색이 왼쪽으로 회전함에 따라 파란색-녹색을 결합하면 녹색이 다시 회전 방향을 반전시켜 빨간색과 동기화되기 때문입니다.
그 GIF에서 감상 할 수있는 또 다른 것은 회전 속도. 모든 기어의 직경과 톱니 수가 같으면 모든 샤프트가 같은 속도로 회전합니다. 반면에 톱니 수 / 직경이 변경되면 속도도 변경됩니다. 이 경우에서 볼 수 있듯이 빨간색은 지름이 더 작기 때문에 가장 빠르게 회전하는 반면 파란색은 중간 속도로 회전하고 녹색은 가장 느리게 회전하는 것입니다.
이에 대응하여 크기를 가지고 노는 속도를 바꿀 수 있다고 생각할 수 있습니다.. 자전거가 기어 변속으로 할 수 있거나 기어 박스가 자동차의 기어비로 할 수있는 것처럼 당신이 맞습니다. 뿐만 아니라 회전 속도를 계산할 수도 있습니다.
두 개의 기어가 맞물리면 하나 소형 (피니언) 및 다른 대형 (휠), 다음이 발생할 수 있습니다.
- 모터 또는 트랙션이 피니언에 적용되고 휠이 구동된다고 상상하면 피니언이 고속으로 회전하고 휠이 더 크지 만 속도가 느려지고 환원제. 동일한 크기 (피니언 = 휠) 인 경우에만 두 축이 동일한 속도로 회전합니다.
- 반면에 견인력이 있고 속도가 적용된 바퀴라고 상상하면 작은 크기가 승수.
기어 변속기 계산
이것을 이해 한 후에는 적용하여 두 기어 사이의 간단한 변속 시스템 계산을 수행 할 수 있습니다. 공식:
N1 Z1 = N2 Z2
여기서 Z는 맞 물리는 기어 1과 2의 톱니 수이고 N은 RPM 단위의 샤프트 회전 속도 (분당 회전 수 또는 분당 회전 수)입니다. 에 대한 ejemplo, 위의 GIF에서 단순화한다고 상상해보십시오.
- 빨간색 (구동) = 톱니 4 개이고 모터는 7RPM의 샤프트에 회전 속도를 적용합니다.
- 파란색 = 이빨 8 개
- 녹색 = 16 개 이빨
이 시스템에서 턴을 계산하려면 먼저 파란색의 속도를 계산해야합니다.
4 7 = 8 z
z = 4 7/8
z = 3.5RPM
즉, 파란색 샤프트는 3.5RPM으로 회전하며 빨간색 샤프트의 4RPM보다 다소 느립니다. 녹색의 회전을 계산하려면 이제 파란색의 속도를 알았습니다.
8 3.5 = 16 z
z = 8 3.5/16
z = 1.75
보시다시피 녹색은 1.75 RPM으로 회전하며 이는 파란색 및 녹색보다 느립니다. 그리고 모터가 녹색 축에 있고 구동 휠이 4RPM으로 회전하면 회전은 청색의 경우 8RPM, 적색의 경우 16RPM이됩니다.
따라서 구동 휠이 작을 때 최종 샤프트에서 더 낮은 속도가 달성되지만 더 큰 힘이 발생합니다. 견인력을 전달하는 것이 큰 바퀴 인 경우 작은 바퀴가 더 빠른 속도를 달성하지만 힘은 적습니다. 왜냐하면 거기 힘 또는 토크 다른? 이 공식을보세요 :
P = T ω
여기서 P는 샤프트에서 전달되는 동력 (와트 (W)), T는 발전된 토크 (Nm), ω 샤프트가 회전하는 각속도 (rad / s). 모터의 동력을 유지하고 회전 속도를 곱하거나 줄이면 T.도 변경되고 T를 일정하게 유지하고 속도를 변경하면 P가 변경됩니다.
축이 X RPM으로 회전하는지, 선형 적으로 얼마나 진행되는지, 즉 선형 속도. 예를 들어, 빨간색에는 DC 모터가 있고 녹색 축에는 모터가 표면을 이동하도록 바퀴를 배치했다고 상상해보십시오. 얼마나 빨리 갈까요?
이렇게하려면 설치 한 타이어의 둘레를 계산하기 만하면됩니다. 이를 위해 직경에 Pi를 곱하면 원주가 제공됩니다. 바퀴가 회전 할 때마다 전진 할 수있는 것을 알고 매분 회전하는 것을 고려하면 선형 속도를 얻을 수 있습니다.
더 나은 방법으로 이해할 수 있도록 동영상을 보여 드리겠습니다.
웜 및 스프로킷 계산
로로 웜 기어 및 스프로킷, 다음 공식으로 계산할 수 있습니다.
나는 = 1 / Z
이는이 시스템에서 나사가 나선형으로 절단 된 단일 톱니 스프로킷으로 간주되기 때문입니다. 예를 들어 톱니 스프로킷이 60 개인 경우 1/60이됩니다 (즉, 스프로킷이 60 회전을 완료하려면 나사가 1 회 회전해야 함을 의미합니다). 또한 웜이 회전하도록 스프로킷을 돌릴 수없는 다른 기계처럼 뒤집을 수없는 메커니즘입니다. 여기서는 웜만 구동축이 될 수 있습니다..
랙 및 피니언 계산
시스템 용 랙 및 피니언, 계산이 다시 변경됩니다.이 경우 다음과 같습니다.
V = (p Z N) / 60
즉, 피니언 이빨의 피치 (미터 단위), 피니언 이빨 수 및 피니언 회전 수 (RPM)를 곱합니다. 예를 들어 톱니 피니언이 60 개, 피치가 30m이고 회전 속도가 0.025RPM 인 시스템이 있다고 가정 해 보겠습니다.
V = (0.025) / 30
V = 0.5m / s
즉, 매초 XNUMX 미터 씩 전진합니다. 그리고이 경우에는 네, 뒤집을 수 있습니다즉, 랙을 세로로 움직이면 피니언을 회전시킬 수있다.
공식을 고려하여 거리를 이동하는 데 걸리는 시간을 계산할 수도 있습니다. 균일 한 라인 이동 (v = d / t), 즉 속도가 거리를 시간으로 나눈 값과 같으면 시간이 지워집니다.
t = d / v
따라서 계산하려는 속도와 거리를 이미 알고있는 경우, 예를 들어 1 미터를 이동하는 데 걸리는 시간을 계산한다고 가정 해보십시오.
t = 1 / 0.5
t = 2 초
기어에 대한 가장 중요한 지식을 습득하여 기어 작동 방식과 향후 프로젝트에서 이점을 얻을 수있는 방법을 이해하는 데 도움이 되었기를 바랍니다.
저와 같은 제작자 (행복하게 은퇴 한)에게는 기어를 디자인하고 인쇄 할 수있는 방법에 대한 명확하고 간결하며 완전한 정보를 가지고있는 것이 좋습니다. 축하합니다