
Mekatronik adalah disiplin yang menggabungkan mekanik dengan elektronik, menjadi cabang kejuruteraan multidisiplin yang menggunakan robotik, elektronik, pengkomputeran, telekomunikasi, kawalan, dll. Untuk melangkaui projek DIY elektronik, dan mula bereksperimen dengan projek mekatronik, anda boleh mula mengintegrasikan peranti seperti enjin o el penggerak linear untuk Arduino anda.
Itu membuka anda dunia kemungkinan baru untuk pembuat. Sebenarnya, penggerak linier ini paling praktikal dengan kemampuan untuk melakukan tindakan mudah alih atau memaksa unsur-unsur lain. Adakah anda ingin mengetahui lebih lanjut? Kami memberitahu anda ...
Jenis penggerak linear

Terdapat beberapa jenis penggerak, walaupun dalam artikel ini kita akan memfokuskan pada yang menggunakan motor elektrik untuk menggerakkan pelocok. Tetapi anda harus tahu bahawa mungkin ada juga jenis lain:
- Hidraulik: mereka menggunakan beberapa jenis cecair untuk menggerakkan piston, contohnya ialah banyak mesin pertanian atau penggali, menggunakan piston dan tekanan minyak ini untuk menggerakkan lengan artikulasi, tekan hidraulik, dll.
- Elektrik: mereka adalah penggerak yang menggunakan skru tanpa henti yang digerakkan oleh motor elektrik untuk menghasilkan pergerakan. Terdapat juga jenis solenoid (elektromagnet), yang menggunakan medan magnet untuk menggerakkan piston atau pelocok dan pegas untuk mengembalikannya ke kedudukan asalnya ketika medan itu tidak digerakkan. Contoh praktikal boleh menjadi contoh terakhir yang saya sampaikan dalam artikel ini, atau banyak lagi robotik, alat mekanikal biasa, dll.
- Tayar: mereka menggunakan udara sebagai bendalir, bukan cairan seperti pada hidraulik. Contohnya adalah penggerak linear khas yang terdapat di bengkel teknologi di beberapa pusat pendidikan.
Matlamat utama peranti ini adalah mengubah tenaga hidraulik, elektrik atau pneumatik dalam tujahan linier dalam kes ini, sehingga memberikan daya, tujahan, bertindak sebagai pengatur, mengaktifkan beberapa mekanisme lain, dll.
Mengenai penggerak linear elektronik
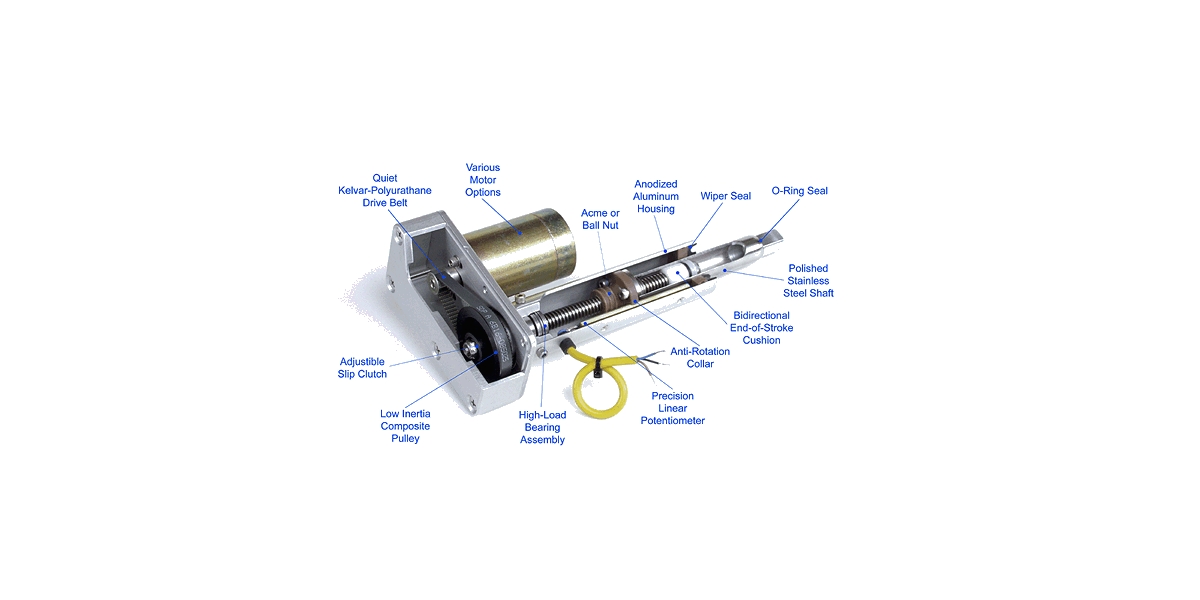
Pada asasnya a penggerak linear elektrik ia tidak lebih daripada motor elektrik, kadangkala boleh menjadi NEMA seperti yang telah dilihat. Motor ini memutar porosnya, dan dengan gabungan roda gigi atau rantai bergigi, ia akan memutar skru tanpa henti. Skru yang tidak berkesudahan ini akan bertugas menggeser omboh atau rod ke satu arah atau yang lain (bergantung pada arah putaran).
Ese pelocok ia akan berfungsi sebagai penggerak untuk mendorong sesuatu, menarik sesuatu, memberi daya, dll. Aplikasi cukup luas. Seperti yang anda lihat, itu adalah sesuatu yang cukup sederhana yang tidak menyimpan terlalu banyak misteri.
Penggerak linier ini, tidak seperti yang tidak linear lain, mempunyai kelebihan untuk dapat melakukan daya dan anjakan besar cukup besar (bergantung pada model). Tetapi untuk Arduino, anda mempunyai beberapa model yang dapat mencapai 20 hingga 150 Kgf (kilogram kekuatan atau kilopond), dan perpindahan 100 hingga 180 mm.
Sebagai kelemahan besar adalah halaju anjakanOleh kerana dengan menggunakan kekuatan yang sangat besar ini, roda pengurangan yang diperlukan untuk meningkatkan tork akan menurunkan kecepatan pemanjangan dan penarikan. Kecepatan 4 hingga 20 mm / s dapat diberikan pada model biasa. Ini bermaksud bahawa keseluruhan proses linier dapat berlangsung dari beberapa lusin saat hingga beberapa minit sekiranya lebih lama dan lebih lambat ...
Bagi dia makan, anda mempunyai pelbagai voltan atau voltan. Sebagai contoh, perkara biasa ialah 12 atau 24v, walaupun anda dapat menjumpai beberapa di bawah dan di atasnya. Bagi penggunaannya, mereka boleh berkisar antara 2A hingga 5A dalam beberapa kes. Seperti yang anda lihat, menjadi enjin yang kuat, penggunaannya tinggi ... Oleh itu, jika anda merancang untuk memberi makan dengan bateri, anda harus mempertimbangkan bahawa mereka mempunyai kemampuan yang diperlukan.
Kawalan penggerak linear
Penggerak linear elektrik yang anda dapati untuk Arduino boleh mempunyai pelbagai jenis kawalan:
- Dengan potensiometer: dengan menggunakan potensiometer mereka membenarkan untuk memilih kedudukan omboh.
- Dengan berakhirnya kerjaya: suis had pada setiap hujung akan membuatnya berhenti sendiri setelah sampai di puncak.
- Diluar kawalan: mereka tidak mempunyai sistem kawalan di atas.
pinout
El pinout penggerak linear tidak boleh lebih sederhana. Ia mempunyai dua kabel konduktif untuk memberi makan motor elektrik yang disatukannya, dan tidak lebih dari itu. Oleh itu, komplikasi sifar. Satu-satunya perkara yang perlu diingat untuk memanjangkan atau menarik kembali batang adalah bahawa putaran motor mesti terbalik (polariti semasa)
Untuk itu mungkin anda boleh gunakan alat kawalan H-bridge seperti yang digunakan untuk motor arus terus. Anda mungkin berfikir bahawa orang seperti dia melayani anda L298N, atau lain dilihat, seperti TB6612FNG, dll. Tetapi kebenarannya adalah bahawa tidak satu pun dari mereka mempunyai daya yang cukup untuk penggerak linier ini (jika besar). Oleh itu, alat kawalan akan habis.
Oleh itu, anda hanya boleh membina kawalan kelajuan anda sendiri menggunakan transistor seperti BJT atau MOSFET, dan genap geganti keadaan pepejal ...
Di mana untuk membeli penggerak linear?
El harga penggerak linear akan banyak bergantung pada ukuran, kelajuan, panjang, dan juga daya yang dapat ditahannya. Anda biasanya dapat menjumpainya dari sekitar € 20 hingga € 200. Dan anda akan dapati dengan mudah di kedai elektronik khusus atau di kedai dalam talian lain seperti Amazon. Sebagai contoh:
- Penggerak solenoid Sourcingmap yang mampu memberikan daya 400g dan 4mm
- Penggerak linear Justech DC 12V hingga 72kg dan 150mm perjalanan
- LHQ-HQ DC 12v dengan kapasiti perjalanan 80 kg dan 50mm
- Tepi laut 12V hingga 300mm dan berat 150kg disokong (dianggarkan 50mm)
- Tiada produk dijumpai.
Sebilangan besar produk ini dilindungi daripada habuk dan percikan oleh sijil IPX54. Dan ingat cadangan pengeluar, bobot yang ditunjukkan tidak selalu disokong untuk semua panjang lanjutan, dalam beberapa kes hanya berat had tertentu yang disokong hingga peluasan tertentu.
Integrasi dengan Arduino
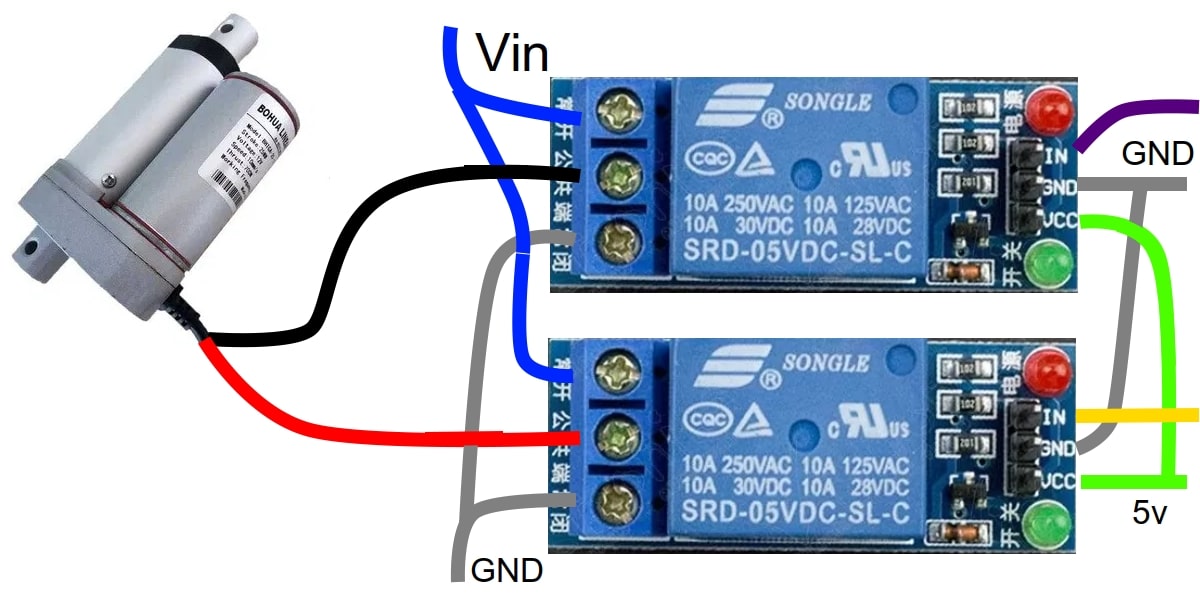
Jenis penggerak ini boleh mempunyai pelbagai penggunaan praktikal jika anda menggabungkannya dengan papan Arduino anda. Untuk melakukan ini, perkara pertama yang harus anda ketahui adalah cara yang anda boleh lakukan buat rajah sambungan dengan lencana anda. Seperti yang anda lihat, sama sekali tidak rumit, jadi tidak terlalu banyak komplikasi.
Seperti yang anda lihat dari skema di atas yang telah saya lukis, saya telah menggunakan dua geganti dan penggerak linear. The garisan berwarna yang anda lihat mewakili perkara berikut:
- Merah dan hitam: adalah kabel penggerak linear yang akan menuju ke setiap relay yang digunakan.
- Kelabu: anda telah menyambung ke tanah atau GND pada setiap relay seperti yang anda lihat.
- Azul: ia pergi ke bekalan kuasa Vin untuk relay, dalam kes ini ia akan berada di antara 5v dan 12v.
- Hijau: Garis Vcc modul disambungkan ke 5v papan Arduino anda.
- Kelabu: juga tanah, disambungkan dari modul ke Arduino GND.
- Ungu dan oren: adalah garis kawalan yang akan menuju ke salah satu pin Arduino untuk mengawal putaran. Contohnya, anda boleh pergi ke D8 dan D9.
Bagi contoh kod sumber untuk Arduino IDE anda, lakaran untuk kawalan asas adalah seperti berikut:
//configurar las salidas digitales
const int rele1 = 8;
const int rele2 = 9;
void setup()
{
pinMode(rele1, OUTPUT);
pinMode(rele2, OUTPUT);
//Poner los relés a bajo
digitalWrite(rele1, LOW);
digitalWrite(rele2, LOW);
}
void loop()
{
extendActuator();
delay(2000);
retractActuator();
delay(2000);
stopActuator();
delay(2000);
}
//Activar uno de los relés para extender el actuador
void extendActuator()
{
digitalWrite(rele2, LOW);
delay(250);
digitalWrite(rele1, HIGH);
}
//Lo inverso a lo anterior para retraer el émbolo
void retractActuator()
{
digitalWrite(rele1, LOW);
delay(250);
digitalWrite(rele2, HIGH);
}
//Poner ambos releś apagados parar el actuador
void stopActuator()
{
digitalWrite(rele1, LOW);
digitalWrite(rele2, LOW);
}
Anda ubah kod untuk dapat mengawal dan meletakkan pelocok pada posisi tertentu jika anda mahu, atau menambah lebih banyak elemen ...