
Arduino może wydawać się bardzo prymitywne, ale w zupełności wystarczy do stworzenia nawet dość zaawansowanych projektów. Z pomocą niektórych istniejących na rynku modułów, takich jak moduły kamer, oraz z pomocą niektórych bibliotek lub interfejsów API, możesz dostarczyć swojemu projektowi inteligencji lub sztuczna wizja. To da nowe zastosowania i nowe horyzonty wykraczające poza podstawowe projekty.
Wizja maszynowa to rodzaj wizji komputerowej. To nie tylko przechwytywanie obrazu za pomocą aparatu cyfrowego, ale idzie dalej. Może być używany do pozyskać dane środowiskoweprzetwarzać obraz, analizować go, rozumieć obrazy świata rzeczywistego itp. Na przykład może służyć do uzyskiwania informacji liczbowych za pośrednictwem aparatu, rozpoznawania ludzi itp. Wyobraź sobie wszystko, co możesz z tym zrobić ...
Do czego służy widzenie komputerowe?
przez ejemplo, wiele obecnych systemów wizyjnych bazuje na tym typie wizji, np. niektóre pojazdy, które umożliwiają automatyczne parkowanie, mapowanie otoczenia, systemy kontroli ruchu na drogach lub rozpoznają pieszych, aby zatrzymać pojazd i nie przejeżdżać po nich, rozpoznawać twarze i uzyskiwać dane od osób zarejestrowanych w bazie danych np. w niektórych systemach bezpieczeństwa, analiza wideo itp.
Potencjał tej maszynowej wizji jest tak ogromny rządy i duże korporacje Używają go do wielu celów, legalnych lub nie. Niektóre praktyczne obszary zastosowań, które z pewnością znasz, to:
- Facebook: używaj tego typu sztucznego widzenia do zdjęć przesyłanych do sieci społecznościowej, w ten sposób możesz rozpoznawać twarze za pomocą złożonych algorytmów. W ten sposób możesz zasilić swoją sztuczną inteligencję, aby uczynić ją bardziej wydajną i ulepszyć ją do innych przyszłych zastosowań.
- Flickr- Możesz użyć tej wizji komputerowej do rekonstrukcji scen 3D za pomocą repozytoriów obrazów na tej platformie.
- Przemysł: Dzięki systemom sztucznej wizji można wykryć usterki na linii montażowej, szybko wyrzucić przedmioty z wadami itp. Na przykład, gdy owoce zebrane w sektorze rolnym przemieszczają się po przenośniku taśmowym, za pomocą czujnika sztucznego widzenia, można było wykryć połamane, uszkodzone, zgniłe owoce lub przedmioty inne niż owoce, aby je usunąć za pomocą strumienia powietrza lub w inny sposób. mechanizmy.
- Nadzór wideo: może być używany w wielu chronionych ośrodkach do przechwytywania określonych pojazdów lub osób, ustalania ich tożsamości i wysyłania wspomnianych informacji do systemu lub zapisywania ich w celu późniejszej analizy. Wiele firm używa go nawet, aby dowiedzieć się, jak się ubierają ludzie (branża modowa), niektóre podmioty, aby dowiedzieć się, kto może uczestniczyć w demonstracjach, wykryć obecność podejrzanego personelu w publicznych lub ruchliwych centrach itp.
Należy pamiętać, że obecnie na ulicy jest mnóstwo wszelkiego rodzaju kamer monitorujących, niezależnie od tego, czy mają one monitorować firmy, banki, DGT itp., Więc wiele informacji jest zbieranych od nas wszystkich...
Niezbędny materiał
Oprócz płytki Arduino z mikrokontrolerem, który można programować i który korzysta z bibliotek, będziesz musiał także inne podstawowe elementy Twojego projektu. Wśród nich oczywiście moduł z kamerą zdolną do przetwarzania obrazu. Przykładem tego jest Pixy CMUCam 5 lub Podobny. Moduł ten posiada wydajny procesor, który można zaprogramować do wysyłania informacji przechwyconych przez czujnik przez port szeregowy UART, SPI, I2C, wyjście cyfrowe lub sygnały analogowe.
Dzięki Pixy CMUCam 5 możesz przetwarzać do 50 klatek lub klatek na sekundę (50 FPS). Dzięki tym możliwościom można go zaprogramować tak, aby wysyłał tylko te obrazy, które są poszukiwane lub wyszukiwane, zamiast ciągłego nagrywania całego przechwyconego wideo. Dla łatwiejszej obsługi ma darmowa aplikacja o otwartym kodzie źródłowym nazwać piksymon dla Twojej kontroli.
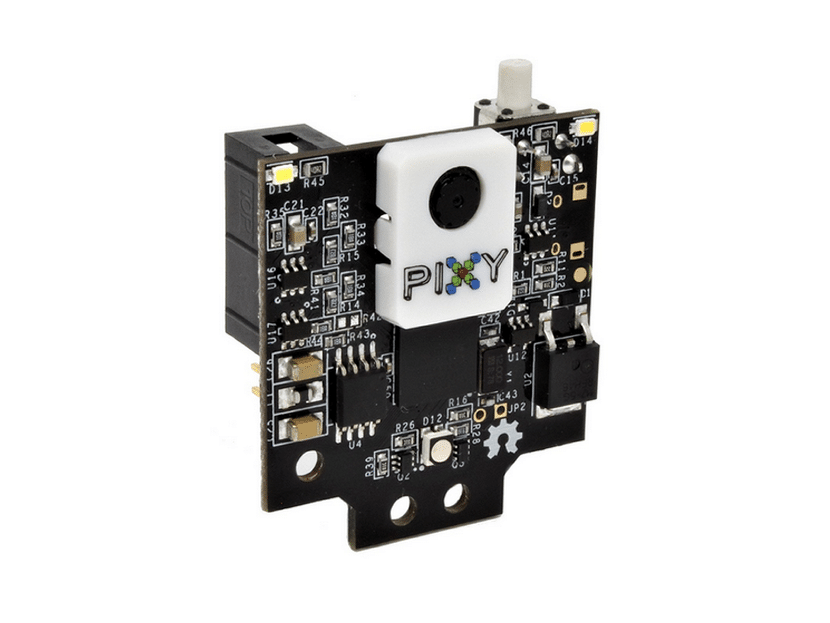
Jeśli zdecydujesz się na zakup tej kamery Pixy CMUcam5, będzie ona wyposażona w 6-pinowy na 10-pinowy kabel IDC oraz elementy montażowe. Dodatkowo, parametry techniczne modułu to:
- Procesor NXP LPC4330 204 MHz DualCore.
- 254 Kb pamięci RAM,
- Zużycie 140mA.
- Przetwornik obrazu Omnivision OV9715 1/4 ″ o rozdzielczości 1280 × 800.
- Kąt widzenia 75º w poziomie i 47º w pionie.
- Proste rozpoznawanie obrazu do lokalizowania obiektów.
- Możesz go używać z płytkami Arduino (z określonymi bibliotekami), Raspberry Pi, BeagleBone Black i innymi podobnymi.
- Porty komunikacyjne: SPI, I2C, UART, USB lub wyjście analogowe / cyfrowe.
- Oprogramowanie PixyMon kompatybilne z Windows, macOS i GNU / Linux.
- Mały rozmiar.
- Dokumentacja dostępna na Wiki projektu.
- Repozytoria Github z biblioteką dla Arduino.
- firmware
- Ćwiczenia
Oprócz tego musisz pamiętać, że masz do dyspozycji inny rodzaj API, biblioteki i więcej materiałów które mogą pomóc w tworzeniu wszelkiego rodzaju projektów za pomocą tych kamer i sztucznej wizji. Na przykład należy zauważyć:
- OpenCV: jest bezpłatną biblioteką wizyjną opracowaną przez firmę Intel. Został wydany na licencji BSD i może być używany przez każdego do wykrywania ruchu, rozpoznawania obiektów, automatycznego widzenia, rozpoznawania twarzy itp. Jest wieloplatformowy, więc może być używany w systemach GNU / Linux, macOS, Windows i Android.
- Inne projekty, takie jak wykrywanie pojazdów.
Z Hwlibre zachęcam do rozpoczęcia eksperymentuj i poznaj tę dyscyplinę...
Prosty przykład integracji Pixy 2 CMUcam5 z Arduino

Aby z tego skorzystać Moduł Pixy 2 CMUcam5 z płytą Arduino, których musisz użyć kilku dodatkowych elementów. Na przykład możesz użyj serwomotoru S06NF lub podobny, aby zadziałać, gdy kamera wykryje obiekt, dla którego została zaprogramowana. Oczywiście będziesz musiał pobrać oprogramowanie PixyMon, które powiedziałem powyżej, oraz bibliotekę GitHub dla Arduino.
Więcej informacji o programowaniu Arduino, możesz pobierz nasz plik PDF z darmowym kursem.
Kiedy już masz zainstalowany PixyMon W systemie operacyjnym wykonaj następujące czynności:
- Podłącz Pixy za pomocą kabla USB i sprawdź, czy świeci się dioda LED RGB modułu, co będzie wskazywać, że działa poprawnie.
- Otwórz aplikację PixyMon i jeśli wszystko się zgadza, zobaczysz, co w tej chwili rejestruje kamera.
- Przejdź do podmenu Akcja lub Akcja, a następnie kliknij Ustaw podpis lub Ustaw podpis. Teraz wideo powinno się zatrzymać i możesz wybrać kolor lub obiekt, który kamera ma wykryć, o ile znajduje się przed czujnikiem. Na przykład możesz użyć piłki. W ten sposób za każdym razem, gdy piłka przejdzie przed czujnikiem, zostanie wykryta.
- Jak widać, jest do 7 Ustaw podpis, dzięki czemu można skonfigurować do 7 różnych obiektów, które kamera może wykryć.
- Jeśli wybierzesz tylko jeden, możesz przejść do następnego kroku. Jeśli chcesz usunąć obiekt z listy, możesz przejść do menu Akcja lub Akcja, a następnie Usuń wszystko Podpisy lub wybierz Usuń określony podpis. Możesz nawet przejść do konfiguracji lub konfiguracji, a następnie przejść do konkretnego podpisu, który chcesz zmodyfikować, aby go zmienić….
Teraz możesz przejść do konfiguracji swojej tablicy Arduino, Jeśli chcesz. Aby to zrobić, już wiesz, że musisz skorzystać z biblioteki Pixy dla Arduino. Ta biblioteka będzie również zawierała proste przykłady, z którymi możesz zacząć eksperymentować bez pisania kodu od zera. Po prostu otwierając je i uruchamiając te szkice lub wprowadzając w nich modyfikacje, aby zobaczyć, jak się zachowują. Aby mieć tę bibliotekę, możesz wykonać następujące kroki.
- Rozładowanie biblioteka dla Arduino.
- Otwórz IDE Arduino.
- Idź do Sketch, Dołącz bibliotekę a następnie Dodaj bibliotekę .zip i wybierz pobraną.
- Teraz będzie to możliwe zacznij testować jakiś przykład z kamerą prawidłowo podłączoną do płyty Arduino. Aby to zrobić, przejdź do menu Przykłady lub Przykłady, a następnie do Pixy i wybierz jeden z nich. Polecam zacząć od Witaj świecie.
- Z płytą Arduino podłączoną przez USB do komputera, wgraj szkic do tablicy, a następnie wybierz Narzędzia, a następnie Monitor szeregowy.
- Teraz okno zacznie pokazywać informacje.
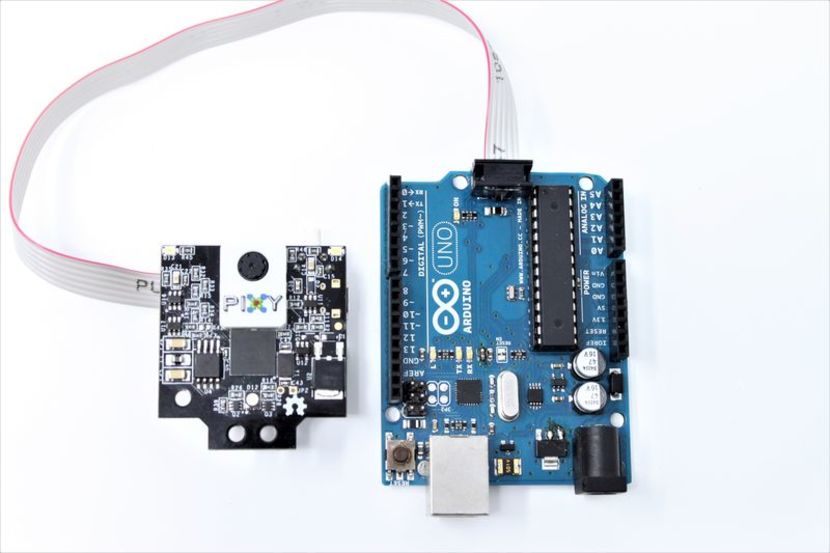
Oczywiście, nie zapomnij podłączyć wszystkich elementów elektronicznych potrzebujesz do swojej płyty Arduino, w tym samej kamery. Wiesz już, że łączy się on z pinami Arduino ISCP przeznaczonymi dla tych modułów, co widać na obrazku ...