
Mecatronica este o disciplină care amestecă mecanica cu electronica, fiind o ramură multidisciplinară a ingineriei care se bazează pe robotică, electronică, calcul, telecomunicații, control etc. Pentru a trece dincolo de proiectele electronice de bricolaj și a începe experimentarea cu proiecte mecatronice, puteți începe să integrați dispozitive precum motoarele ieșire actuator liniar pentru Arduino.
Asta te deschide o lume nouă de posibilități pentru producători. De fapt, acest actuator liniar este cel mai practic cu capacitatea de a efectua acțiuni mobile sau de a exercita forță asupra altor elemente. Vrei să afli mai multe? Îți spunem ...
Tipuri de actuatoare liniare

Există mai multe tipuri de actuatoare, deși în acest articol ne vom concentra pe cel care folosește un motor electric pentru a acționa pistonul. Dar trebuie să știți că pot exista și alte tipuri:
- Hidraulică: folosesc un anumit tip de fluid pentru a mișca pistonul, un exemplu poate fi cel al multor mașini agricole sau excavatoare, folosind aceste pistoane și presiunea uleiului pentru a deplasa brațele articulate, prese hidraulice etc.
- electric: sunt actuatoare care folosesc un șurub nesfârșit mișcat de un motor electric pentru a genera mișcarea. Există, de asemenea, de tip solenoid (electromagnet), care utilizează un câmp magnetic pentru a muta pistonul sau pistonul și un arc pentru a-l readuce în poziția inițială atunci când acel câmp nu este exercitat. Un exemplu practic poate fi ultimul exemplu pe care îl prezint în acest articol sau, de asemenea, multe altele despre robotică, dispozitive mecanice obișnuite etc.
- Anvelope: folosesc aerul ca fluid, în loc de lichid ca în cazul hidraulicii. Un exemplu în acest sens sunt actuatorii liniari tipici găsiți în atelierele de tehnologie ale unor centre de învățământ.
Scopul final al acestui dispozitiv este transformă o energie hidraulic, electric sau pneumatic într-o forță liniară în acest caz, exercitând astfel forță, forță, acționând ca un regulator, activând un alt mecanism etc.
Despre actuatorul liniar electronic
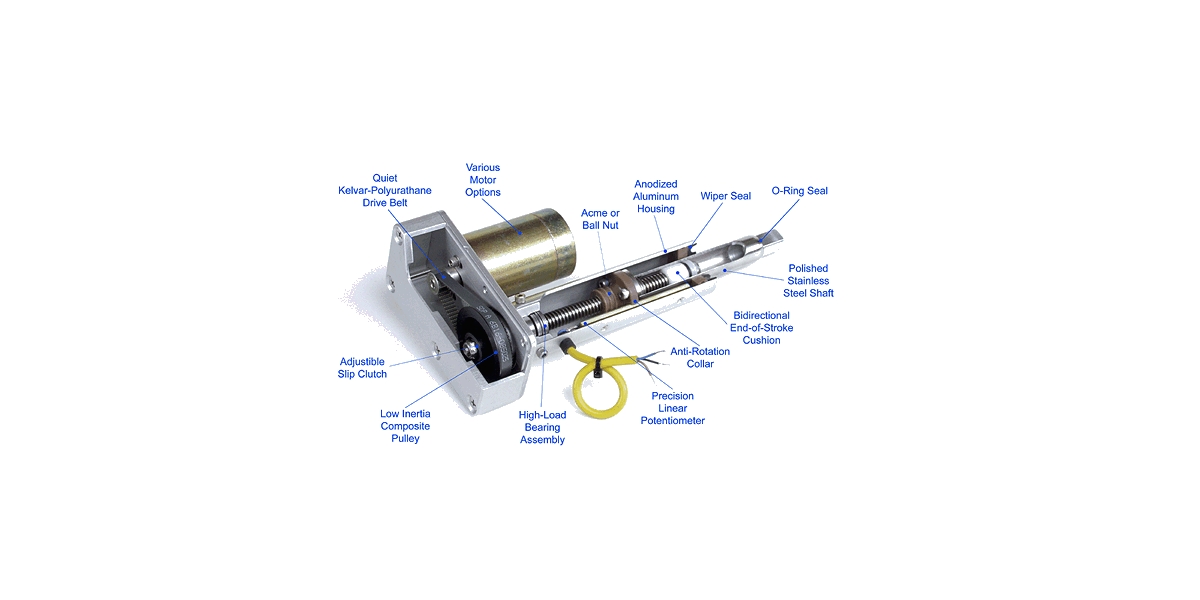
Practic un actuator liniar electric uneori nu este altceva decât un motor electric poate fi un NEMA după cum s-a văzut deja. Acest motor își întoarce arborele și printr-o combinație de roți dințate sau lanțuri dințate va întoarce un vierme. Acest șurub fără sfârșit va fi responsabil pentru alunecarea într-o direcție sau alta (în funcție de direcția de rotație) a pistonului sau tijei.
ese pompă de WC va fi cel care servește drept actuator pentru a împinge ceva, pentru a trage ceva, pentru a exercita o forță etc. Aplicațiile sunt destul de largi. După cum puteți vedea, este ceva destul de simplu care nu deține prea multe mistere.
Aceste actuatoare liniare, spre deosebire de alte neliniare, au avantajul că pot exercita forțe și deplasări mari considerabil (în funcție de model). Dar pentru Arduino, aveți câteva modele care pot merge de la 20 la 150 Kgf (kilogram forță sau kilopond) și deplasări de la 100 la 180 mm.
Ca un mare dezavantaj este viteza de deplasareDeoarece prin exercitarea acestor forțe enorme, roțile de reducere necesare pentru creșterea cuplului vor reduce viteza de extensie și retragere. Viteze de la 4 la 20 mm / s pot fi date pe modele tipice. Aceasta înseamnă că, pentru a finaliza întregul proces liniar, poate trece de la câteva zeci de secunde la câteva minute în cazul în care este mai lung și mai lent ...
Cât despre a lui alimentación, le aveți de diferite tensiuni sau tensiuni. De exemplu, lucrul obișnuit este că acestea sunt de 12 sau 24v, deși puteți găsi unele mai jos și mai sus. În ceea ce privește consumul lor, acestea pot varia de la 2A la 5A în unele cazuri. După cum puteți vedea, fiind un motor puternic, consumul este mare ... Deci, dacă intenționați să-l alimentați cu baterii, trebuie să considerați că au capacitatea necesară.
Controlul actuatorului liniar
Servomotorul electric linear pe care îl puteți găsi pentru Arduino ar putea avea diferite tipuri de Control:
- Cu potențiometru: prin intermediul unui potențiometru permit selectarea poziției pistonului.
- Cu sfârșitul carierei: un comutator de limită la fiecare capăt îl va face să se oprească singur odată ce ajunge în vârf.
- Fara control: nu au niciunul dintre sistemele de control de mai sus.
pinout
El pin out unui actuator liniar nu ar putea fi mai simplu. Are două cabluri conductoare pentru a alimenta motorul electric pe care îl integrează și nimic mai mult decât atât. Prin urmare, zero complicații. Singurul lucru care trebuie avut în vedere pentru a extinde sau retrage tija este că rotația motorului trebuie inversată (polaritatea curentă).
Pentru ca acest lucru să fie posibil, poți utilizați un controler H-bridge ca cel folosit pentru motoarele cu curent continuu. Ai putea crede că cineva ca el te servește L298N, u otros văzut, cum ar fi TB6612FNG etc. Dar adevărul este că niciunul dintre ei nu are suficientă putere pentru aceste actuatoare liniare (dacă sunt mari). Prin urmare, controlerul ar arde.
Prin urmare, nu puteți construi decât propriul control al vitezei folosind tranzistoare precum BJT-uri sau MOSFET-uri și chiar relee stare solidă ...
De unde să cumpărați un actuator liniar?
El precio a actuatorului liniar va depinde în mare măsură de mărimea, viteza, lungimea și, de asemenea, forța pe care o poate rezista. De obicei, le puteți găsi între 20 și 200 EUR. Și le veți găsi cu ușurință în magazine specializate de electronice sau în alte magazine online, cum ar fi Amazon. De exemplu:
- Actuator solenoid cu sursă, capabil să exercite o forță de 400g și 4mm
- Actuator liniar Justech DC 12V până la 72 kg și 150 mm de deplasare
- LHQ-HQ DC 12v cu capacitate de 80 kg și 50 mm de deplasare
- Seafront 12V până la 300mm și greutatea de 150 kg acceptată (estimată la 50mm)
- Nu au fost găsite produse.
Multe dintre aceste produse sunt protejate împotriva praf și stropi prin certificatul IPX54. Și țineți cont de recomandările producătorului, greutățile indicate nu sunt întotdeauna acceptate pentru toate lungimile extensiei, în unele cazuri doar o anumită greutate limită este acceptată până la o anumită extensie.
Integrare cu Arduino
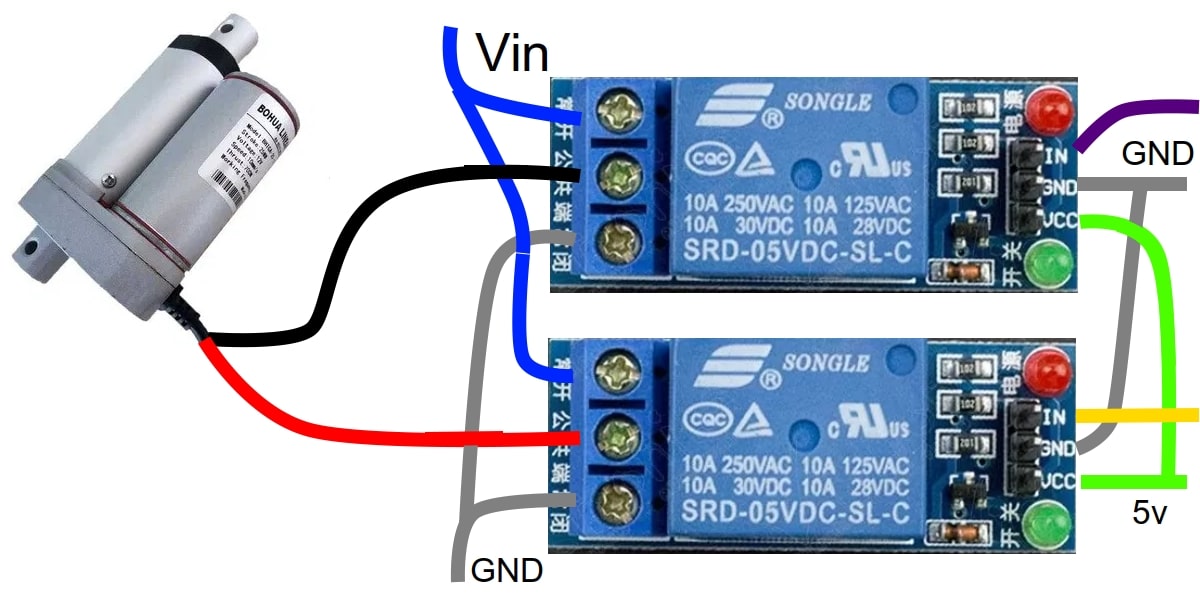
Aceste tipuri de actuatoare pot avea utilizări practice variate dacă le integrați cu placa dvs. Arduino. Pentru a face acest lucru, primul lucru pe care ar trebui să-l știți este modul în care puteți faceți diagrama de conexiune cu insigna ta. După cum puteți vedea, nu este deloc complicat, deci nu prezintă prea multe complicații.
După cum puteți vedea din schema de mai sus pe care am desenat-o, am folosit două relee și un actuator liniar. linii colorate pe care le vedeți reprezintă următoarele:
- roșu și negru: acestea sunt cablurile actuatorului liniar care vor merge la fiecare dintre releele utilizate.
- Gri: v-ați conectat la masă sau GND în fiecare dintre relee, după cum puteți vedea.
- Azul: merge la sursa de alimentare Vin pentru releu, în acest caz va fi între 5v și 12v.
- verde: liniile Vcc ale modulului sunt conectate la 5v de pe placa dvs. Arduino.
- Gri: de asemenea la masă, conectat de la modul la Arduino GND.
- Violet și portocaliu: sunt liniile de control care vor merge la oricare dintre pinii Arduino pentru a controla rotirea. De exemplu, puteți merge la D8 și D9.
În ceea ce privește exemplul cod sursă pentru IDE-ul dvs. Arduino, schița pentru controlul de bază ar fi după cum urmează:
//configurar las salidas digitales
const int rele1 = 8;
const int rele2 = 9;
void setup()
{
pinMode(rele1, OUTPUT);
pinMode(rele2, OUTPUT);
//Poner los relés a bajo
digitalWrite(rele1, LOW);
digitalWrite(rele2, LOW);
}
void loop()
{
extendActuator();
delay(2000);
retractActuator();
delay(2000);
stopActuator();
delay(2000);
}
//Activar uno de los relés para extender el actuador
void extendActuator()
{
digitalWrite(rele2, LOW);
delay(250);
digitalWrite(rele1, HIGH);
}
//Lo inverso a lo anterior para retraer el émbolo
void retractActuator()
{
digitalWrite(rele1, LOW);
delay(250);
digitalWrite(rele2, HIGH);
}
//Poner ambos releś apagados parar el actuador
void stopActuator()
{
digitalWrite(rele1, LOW);
digitalWrite(rele2, LOW);
}
Tu modificați codul pentru a putea controla și poziționa pistonul în poziții specifice, dacă doriți, sau adăuga mai multe elemente ...