
Мехатроника - это дисциплина, в которой механика сочетается с электроникой, являясь междисциплинарной отраслью инженерии, которая опирается на робототехнику, электронику, вычисления, телекоммуникации, управление и т. Д. Чтобы выйти за рамки электронных DIY-проектов и начать экспериментировать с мехатронными проектами, вы можете начать интегрировать такие устройства, как двигатели o el линейный привод для вашего Arduino.
Это открывает вам новый мир возможностей для производителей. Фактически, этот линейный актуатор является наиболее практичным, поскольку он может выполнять подвижные действия или воздействовать на другие элементы. Вы хотите знать больше? Мы вам скажем ...
Типы прямоходных приводов

Существует несколько типов приводов, хотя в этой статье мы сосредоточимся на том, в котором для привода плунжера используется электродвигатель. Но следует знать, что могут быть и другие виды:
- Гидравлика: Они используют какой-то тип жидкости для перемещения поршня. Примером может служить то, что многие сельскохозяйственные машины или экскаваторы используют эти поршни и давление масла для перемещения шарнирных рычагов, гидравлических прессов и т. Д.
- электрический: это приводы, которые используют бесконечный винт, вращаемый электродвигателем, для создания движения. Есть также соленоидный тип (электромагнит), который использует магнитное поле для перемещения поршня или плунжера и пружину, чтобы вернуть его в исходное положение, когда это поле не действует. Практическим примером может быть последний пример, который я представляю в этой статье, а также многие другие примеры робототехники, обычных механических устройств и т. Д.
- Шины: в качестве жидкости используется воздух, а не жидкость, как в случае гидравлики. Примером этого являются типичные линейные приводы, которые можно найти в технологических мастерских некоторых учебных центров.
Конечная цель этого устройства - преобразовать энергию в этом случае гидравлический, электрический или пневматический с линейной тягой, создавая таким образом силу, тягу, действуя как регулятор, приводя в действие какой-либо другой механизм и т. д.
Об электронном поступательном приводе
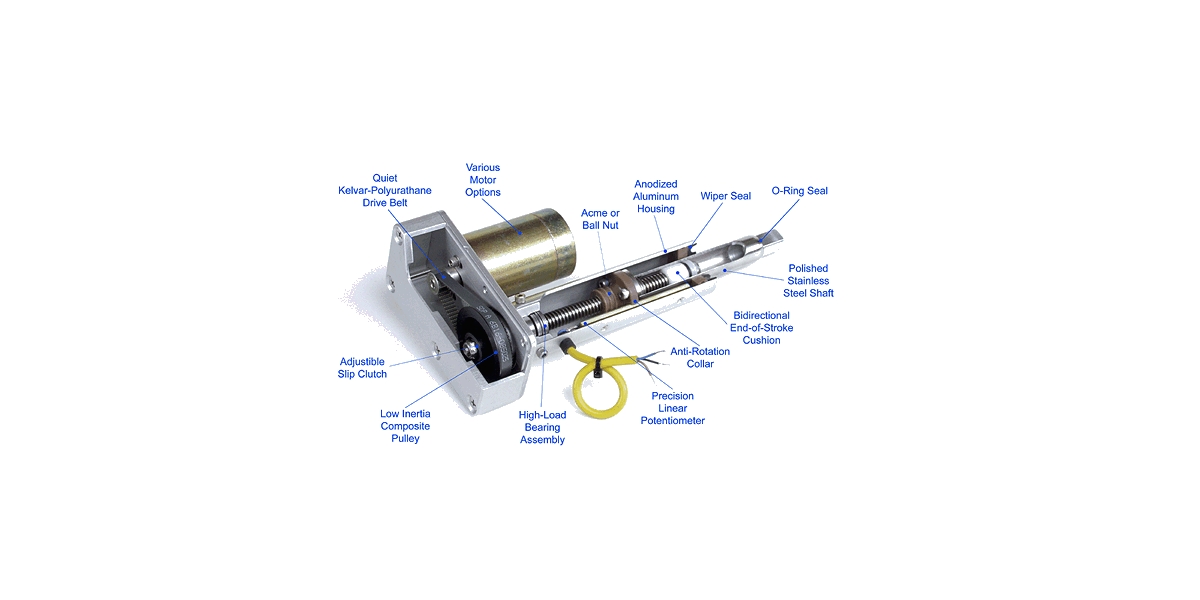
В основном электрический линейный привод это не более чем электродвигатель, иногда может быть NEMA как уже было видно. Этот двигатель вращает свой вал, и с помощью комбинации шестерен или зубчатых цепей он вращает бесконечный винт. Этот бесконечный винт будет отвечать за скольжение поршня или штока в том или ином направлении (в зависимости от направления вращения).
Что поршень это будет тот, который служит приводом, чтобы что-то толкать, что-то тянуть, прикладывать силу и т. д. Сферы применения достаточно широки. Как видите, это довольно простая вещь, в которой не так уж много загадок.
Эти линейные приводы, в отличие от других нелинейных, имеют то преимущество, что они могут большие силы и перемещения значительные (в зависимости от модели). Но для Arduino у вас есть модели, которые могут работать от 20 до 150 кгс (килограмм-сила или килопонд) и смещения от 100 до 180 мм.
Большим недостатком является то, что скорость перемещенияПоскольку при приложении этих огромных усилий редукционные колеса, необходимые для увеличения крутящего момента, будут вызывать снижение скорости выдвижения и втягивания. Для типичных моделей скорость может составлять от 4 до 20 мм / с. Это означает, что для завершения всего линейного процесса он может занять от нескольких десятков секунд до нескольких минут, если он будет дольше и медленнее ...
Что касается его вскармливание, у вас они разного напряжения или напряжения. Например, обычно они на 12 или 24 В, хотя вы можете найти их ниже и выше. Что касается их потребления, в некоторых случаях они могут составлять от 2А до 5А. Как видите, двигатель мощный, расход высокий ... Так что если вы планируете его кормить с батареями, необходимо учитывать, что у них есть необходимая мощность.
Управление линейным приводом
Электрический линейный привод, который вы можете найти для Arduino, может иметь различные типы управления:
- С потенциометром: с помощью потенциометра они позволяют выбрать положение поршня.
- С окончанием карьеры: концевой выключатель на каждом конце заставит его остановиться самостоятельно, когда он достигнет вершины.
- Вне контроля: у них нет ни одной из вышеперечисленных систем управления.
Распиновка
El цоколевка линейного привода не может быть проще. У него есть два токопроводящих кабеля для питания электромотора, который он объединяет, и не более того. Поэтому никаких сложностей. Единственное, что нужно помнить, выдвигая или втягивая шток, - это то, что двигатель должен вращаться в обратном направлении (полярность тока).
Чтобы это было возможно, вы можете используйте контроллер H-моста как тот, который используется для двигателей постоянного тока. Вы можете подумать, что кто-то вроде него служит вам L298N, В другие видел, например TB6612FNG и тд. Но правда в том, что ни у одного из них нет достаточной мощности для этих линейных приводов (если они большие). Следовательно, перегорел бы контроллер.
Следовательно, вы можете строить только ваш собственный контроль скорости используя транзисторы, такие как BJT или MOSFET, и даже реле твердое состояние ...
Где купить прямоходный привод?
El precio линейного привода будет во многом зависеть от размера, скорости, длины, а также силы, которую он может выдержать. Обычно вы можете найти их примерно от 20 до 200 евро. И вы легко найдете их в специализированных магазинах электроники или других интернет-магазинах, таких как Amazon. Например:
- Электромагнитный привод Sourcingmap, способный прикладывать силу 400 г и 4 мм
- Линейный привод Justech DC 12V с ходом до 72 кг и ходом 150 мм
- LHQ-HQ DC 12 В с грузоподъемностью 80 кг и ходом 50 мм
- Seafront 12V до 300 мм и 150 кг поддерживаемого веса (ориентировочно для 50 мм)
- Товар не был найден.
Многие из этих продуктов защищены от пыль и брызги по сертификату IPX54. И имейте в виду рекомендации производителя, указанные веса не всегда поддерживаются для всех удлинителей, в некоторых случаях поддерживается только определенный предельный вес вплоть до определенного удлинения.
Интеграция с Arduino
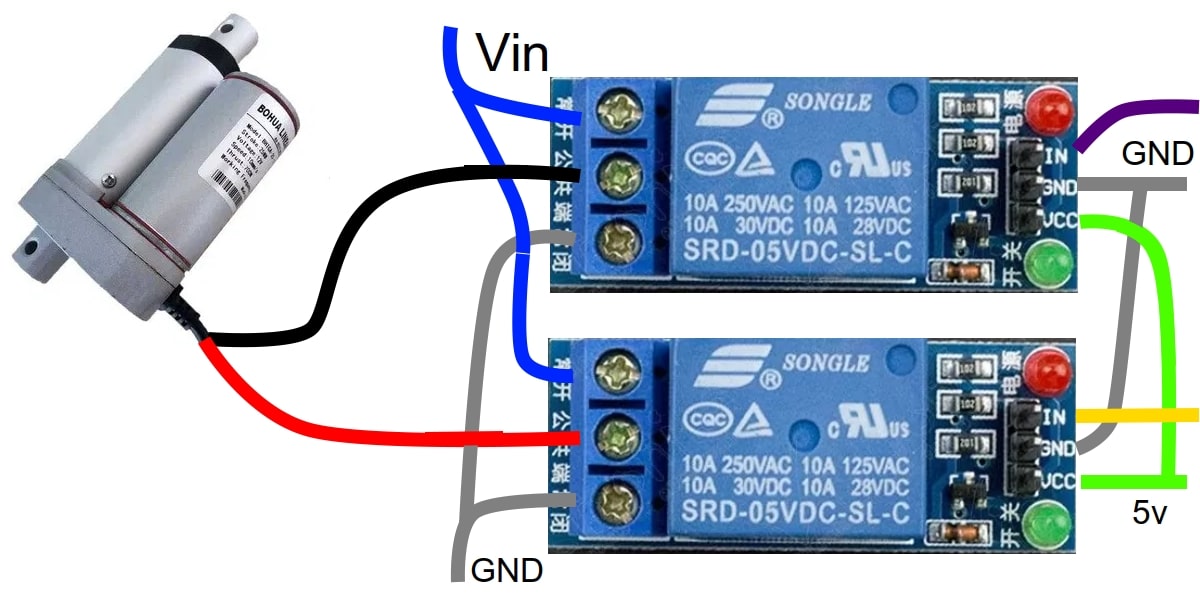
Эти типы приводов могут иметь различное практическое применение, если вы интегрируете их с платой Arduino. Для этого первое, что вы должны знать, - это то, как вы можете сделать схему подключения с вашим значком. Как видите, это совсем несложно, поэтому особых сложностей не вызывает.
Как вы можете видеть из приведенной выше схемы, я использовал два реле и линейный привод. В цветные линии вы видите следующее:
- красный и черный: кабели линейного привода, которые будут идти к каждому из используемых реле.
- Грэй: вы подключили к земле или GND в каждом из реле, как вы можете видеть.
- синий: он идет на Vin питания реле, в этом случае он будет между 5В и 12В.
- Зеленый: линии Vcc модуля подключены к 5 В на вашей плате Arduino.
- Грэй: также земля, подключенная от модуля к Arduino GND.
- Фиолетовый и оранжевый: линии управления, которые будут идти к любому из контактов Arduino для управления вращением. Например, вы можете перейти на D8 и D9.
Что касается примера исходный код для вашей Arduino IDE, эскиз для базового элемента управления будет следующим:
//configurar las salidas digitales
const int rele1 = 8;
const int rele2 = 9;
void setup()
{
pinMode(rele1, OUTPUT);
pinMode(rele2, OUTPUT);
//Poner los relés a bajo
digitalWrite(rele1, LOW);
digitalWrite(rele2, LOW);
}
void loop()
{
extendActuator();
delay(2000);
retractActuator();
delay(2000);
stopActuator();
delay(2000);
}
//Activar uno de los relés para extender el actuador
void extendActuator()
{
digitalWrite(rele2, LOW);
delay(250);
digitalWrite(rele1, HIGH);
}
//Lo inverso a lo anterior para retraer el émbolo
void retractActuator()
{
digitalWrite(rele1, LOW);
delay(250);
digitalWrite(rele2, HIGH);
}
//Poner ambos releś apagados parar el actuador
void stopActuator()
{
digitalWrite(rele1, LOW);
digitalWrite(rele2, LOW);
}
Вы изменить код чтобы иметь возможность контролировать и позиционировать поршень в определенных положениях, если хотите, или добавить дополнительные элементы ...