
เมคคาทรอนิกส์เป็นสาขาวิชาที่ผสมผสานกลศาสตร์กับอิเล็กทรอนิกส์เป็นสาขาวิศวกรรมสหสาขาวิชาชีพที่ใช้หุ่นยนต์อิเล็กทรอนิกส์คอมพิวเตอร์โทรคมนาคมการควบคุม ฯลฯ หากต้องการก้าวไปไกลกว่าโครงการอิเล็กทรอนิกส์ DIY และเริ่มทดลองกับโครงการเมคคาทรอนิกส์คุณสามารถเริ่มรวมอุปกรณ์เช่น เครื่องยนต์ ทั้ง ตัวกระตุ้นเชิงเส้น สำหรับ Arduino ของคุณ
ที่เปิดคุณ โลกใหม่แห่งความเป็นไปได้ สำหรับผู้ผลิต ในความเป็นจริงแอคชูเอเตอร์เชิงเส้นนี้ใช้งานได้จริงมากที่สุดโดยมีความสามารถในการดำเนินการเคลื่อนที่หรือออกแรงกับองค์ประกอบอื่น ๆ คุณต้องการทราบข้อมูลเพิ่มเติมหรือไม่? เราบอกคุณว่า ...
ประเภทของตัวกระตุ้นเชิงเส้น

มีแอคชูเอเตอร์หลายประเภทแม้ว่าในบทความนี้เราจะมุ่งเน้นไปที่ตัวกระตุ้นที่ใช้มอเตอร์ไฟฟ้าในการขับเคลื่อนลูกสูบ แต่คุณควรรู้ว่าอาจมีประเภทอื่น ๆ ด้วย:
- ระบบไฮดรอลิกส์: พวกเขาใช้ของไหลบางชนิดในการเคลื่อนลูกสูบตัวอย่างเช่นเครื่องจักรการเกษตรหรือรถขุดจำนวนมากโดยใช้ลูกสูบเหล่านี้และแรงดันน้ำมันในการเคลื่อนแขนข้อต่อเครื่องอัดไฮดรอลิกเป็นต้น
- ไฟฟ้า: เป็นตัวกระตุ้นที่ใช้สกรูที่ไม่มีที่สิ้นสุดซึ่งเคลื่อนที่โดยมอเตอร์ไฟฟ้าเพื่อสร้างการเคลื่อนไหว นอกจากนี้ยังมีประเภทโซลินอยด์ (แม่เหล็กไฟฟ้า) ซึ่งใช้สนามแม่เหล็กเพื่อเคลื่อนลูกสูบหรือลูกสูบและสปริงเพื่อกลับสู่ตำแหน่งเดิมเมื่อสนามนั้นไม่ได้ออกแรง ตัวอย่างที่ใช้งานได้จริงอาจเป็นตัวอย่างสุดท้ายที่ฉันนำเสนอในบทความนี้หรืออื่น ๆ อีกมากมายเกี่ยวกับหุ่นยนต์อุปกรณ์กลไกทั่วไป ฯลฯ
- ยาง: พวกเขาใช้อากาศเป็นของไหลแทนที่จะเป็นของเหลวเช่นเดียวกับในกรณีของระบบไฮดรอลิกส์ ตัวอย่างเหล่านี้คือตัวกระตุ้นเชิงเส้นทั่วไปที่พบในเวิร์กช็อปเทคโนโลยีของศูนย์การศึกษาบางแห่ง
เป้าหมายสูงสุดของอุปกรณ์นี้คือ เปลี่ยนพลังงาน ไฮดรอลิกไฟฟ้าหรือนิวเมติกในแรงขับเชิงเส้นในกรณีนี้จึงออกแรงผลักทำหน้าที่เป็นตัวควบคุมเปิดใช้งานกลไกอื่น ๆ
เกี่ยวกับตัวกระตุ้นเชิงเส้นอิเล็กทรอนิกส์
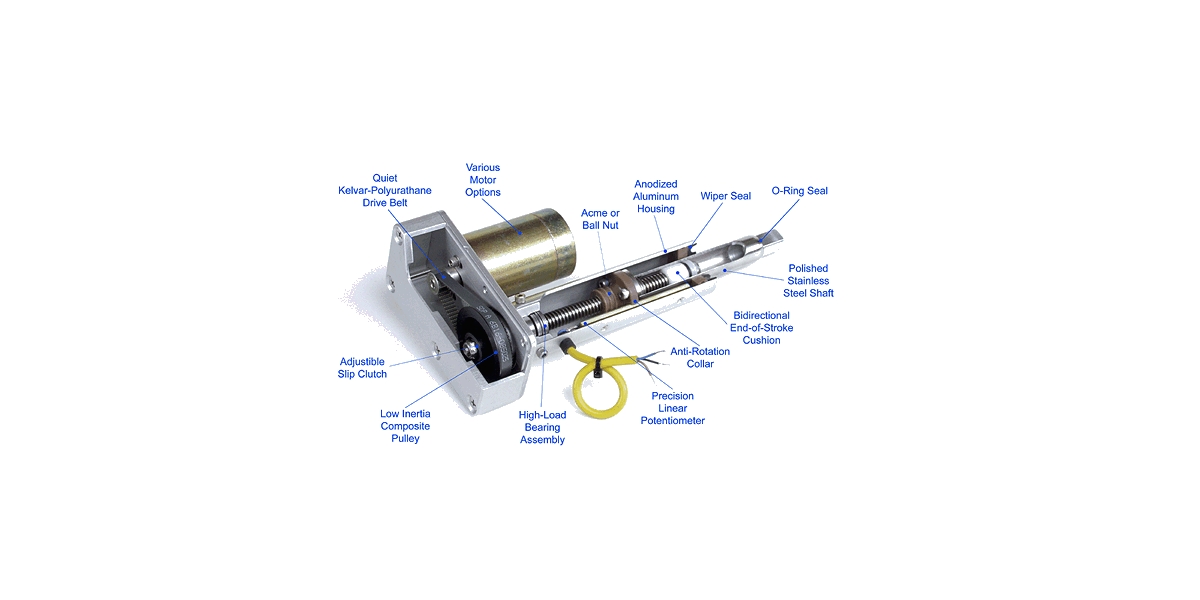
โดยทั่วไปก ตัวกระตุ้นเชิงเส้นไฟฟ้า มันไม่มีอะไรมากไปกว่ามอเตอร์ไฟฟ้าในบางครั้ง สามารถเป็น NEMA ตามที่เห็นแล้ว มอเตอร์นี้หมุนเพลาและด้วยการผสมผสานระหว่างเฟืองหรือโซ่ที่มีฟันจะทำให้สกรูไม่มีที่สิ้นสุด สกรูที่ไม่มีที่สิ้นสุดนี้จะทำหน้าที่ในการเลื่อนลูกสูบหรือแกนไปในทิศทางเดียวหรืออีกทิศทางหนึ่ง
ที่ ลูกสูบ มันจะเป็นสิ่งที่ทำหน้าที่เป็นตัวกระตุ้นเพื่อผลักบางสิ่งดึงบางอย่างออกแรง ฯลฯ การใช้งานค่อนข้างกว้าง อย่างที่คุณเห็นมันเป็นอะไรที่ค่อนข้างเรียบง่ายที่ไม่ได้มีความลึกลับมากเกินไป
ตัวกระตุ้นเชิงเส้นเหล่านี้ไม่เหมือนกับตัวกระตุ้นที่ไม่ใช่เชิงเส้นอื่น ๆ มีข้อดีคือสามารถออกแรงได้ กองกำลังขนาดใหญ่และการเคลื่อนย้าย มาก (ขึ้นอยู่กับรุ่น) แต่สำหรับ Arduino คุณมีบางรุ่นที่สามารถเปลี่ยนได้ตั้งแต่ 20 ถึง 150 Kgf (แรงกิโลกรัมหรือกิโลวอนด์) และการเคลื่อนที่ 100 ถึง 180 มม.
ข้อเสียเปรียบอย่างมากก็คือ ความเร็วของการกระจัดเนื่องจากการออกแรงมหาศาลเหล่านี้ล้อลดแรงที่จำเป็นในการเพิ่มแรงบิดจะทำให้ความเร็วในการขยายและการหดกลับลดลง สามารถให้ความเร็ว 4 ถึง 20 มม. / วินาทีในรุ่นทั่วไป ซึ่งหมายความว่าในการดำเนินกระบวนการเชิงเส้นให้เสร็จสมบูรณ์สามารถเปลี่ยนจากไม่กี่สิบวินาทีเป็นไม่กี่นาทีในกรณีที่ยาวและช้ากว่า ...
สำหรับเขา ALIMENTACIONคุณมีแรงดันไฟฟ้าหรือแรงดันไฟฟ้าต่างๆ ตัวอย่างเช่นปกติคือ 12 หรือ 24v แม้ว่าคุณจะพบบางส่วนด้านล่างและด้านบน เกี่ยวกับการบริโภคของพวกเขาอาจมีตั้งแต่ 2A ถึง 5A ในบางกรณี อย่างที่คุณเห็นการเป็นเครื่องยนต์ที่ทรงพลังการบริโภคจึงสูง ... ดังนั้นหากคุณวางแผนที่จะให้อาหารมัน พร้อมแบตเตอรี่คุณต้องพิจารณาว่าพวกเขามีความสามารถที่จำเป็น
การควบคุมตัวกระตุ้นเชิงเส้น
ตัวกระตุ้นเชิงเส้นไฟฟ้าที่คุณสามารถหาได้สำหรับ Arduino อาจมีหลายประเภท ควบคุม:
- ด้วยโพเทนชิออมิเตอร์: ด้วยโพเทนชิออมิเตอร์ที่อนุญาตให้เลือกตำแหน่งของลูกสูบ
- เมื่อสิ้นสุดอาชีพ: ลิมิตสวิตช์ที่ปลายแต่ละด้านจะทำให้มันหยุดเองเมื่อถึงจุดสูงสุด
- ควบคุมไม่ได้: พวกเขาไม่มีระบบควบคุมใด ๆ ข้างต้น
pinout
El pinout ของตัวกระตุ้นเชิงเส้นไม่สามารถทำได้ง่ายกว่านี้ มันมีสายนำไฟฟ้าสองเส้นเพื่อป้อนมอเตอร์ไฟฟ้าที่รวมเข้าด้วยกันและไม่มีอะไรมากไปกว่านั้น ดังนั้นภาวะแทรกซ้อนเป็นศูนย์ สิ่งเดียวที่ควรทราบในการขยายหรือหดก้านคือการหมุนของมอเตอร์จะต้องกลับด้าน (ขั้วปัจจุบัน)
เพื่อให้เป็นไปได้คุณสามารถทำได้ ใช้คอนโทรลเลอร์ H-bridge เช่นเดียวกับที่ใช้สำหรับมอเตอร์กระแสตรง คุณอาจคิดว่าคนอย่างเขาสมน้ำหน้าคุณ L298N, U otros ที่เห็นเช่น TB6612FNG เป็นต้น แต่ความจริงก็คือไม่มีตัวใดที่มีพลังเพียงพอสำหรับตัวกระตุ้นเชิงเส้นเหล่านี้ (หากมีขนาดใหญ่) ดังนั้นตัวควบคุมจะไหม้หมด
ดังนั้นคุณสามารถสร้าง การควบคุมความเร็วของคุณเอง โดยใช้ทรานซิสเตอร์เช่น BJTs หรือ MOSFET และแม้กระทั่ง รีเลย์ สถานะของแข็ง ...
หาซื้อ Linear Actuator ได้ที่ไหน?
El ราคา ของตัวกระตุ้นเชิงเส้นส่วนใหญ่จะขึ้นอยู่กับขนาดความเร็วความยาวและแรงที่สามารถทนได้ โดยปกติคุณจะพบได้ตั้งแต่ประมาณ€ 20 ถึง€ 200 และคุณจะพบได้อย่างง่ายดายในร้านขายเครื่องใช้ไฟฟ้าเฉพาะทางหรือร้านค้าออนไลน์อื่น ๆ เช่น Amazon ตัวอย่างเช่น:
- Sourcingmap ตัวกระตุ้นโซลินอยด์ที่สามารถออกแรงได้ 400g และ 4mm
- Justech DC 12V Linear Actuator สูงสุด 72 กก. และ 150 มม
- LHQ-HQ DC 12v พร้อมความจุสำหรับการเดินทาง 80 กก. และ 50 มม
- หน้าทะเล 12V ถึง 300 มม. และ 150 กก. ของน้ำหนักที่รองรับ (ประมาณ 50 มม.)
- ผลิตภัณฑ์ที่ไม่พบ
ผลิตภัณฑ์เหล่านี้จำนวนมากได้รับการป้องกัน ฝุ่นละอองและกระเด็น โดยใบรับรอง IPX54 และคำนึงถึงคำแนะนำของผู้ผลิตน้ำหนักที่ระบุไม่ได้รับการสนับสนุนสำหรับความยาวส่วนขยายทั้งหมดเสมอไปในบางกรณีน้ำหนัก จำกัด บางส่วนเท่านั้นที่รองรับส่วนขยายที่กำหนด
บูรณาการกับ Arduino
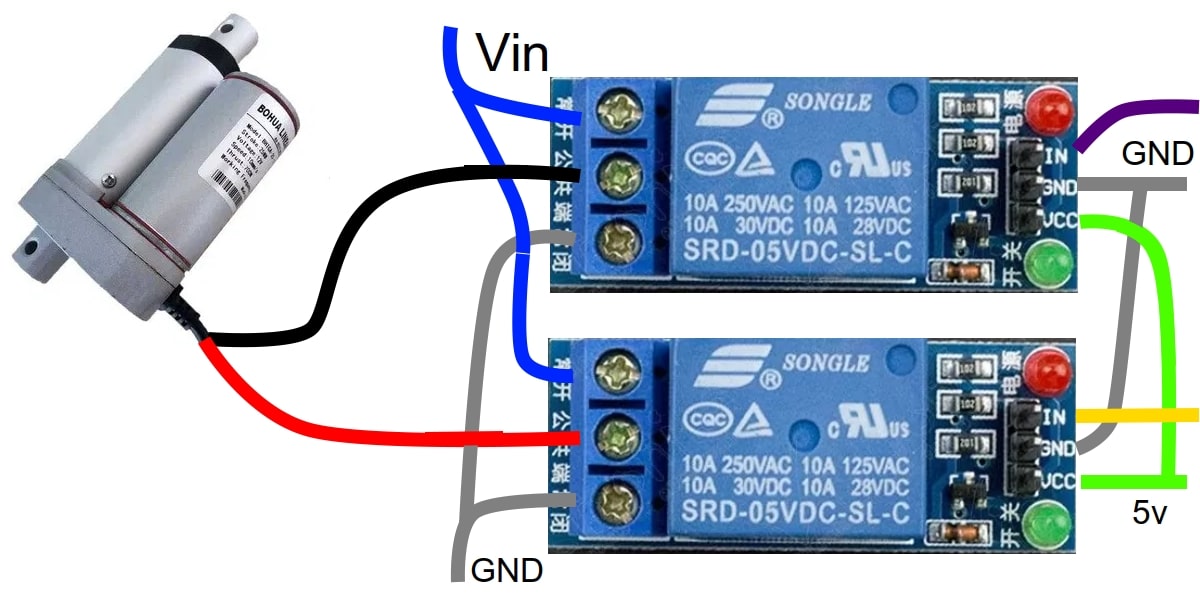
แอคชูเอเตอร์ประเภทนี้สามารถใช้งานได้หลากหลายหากคุณรวมเข้ากับบอร์ด Arduino ของคุณ ในการทำเช่นนี้สิ่งแรกที่คุณควรรู้คือวิธีที่คุณสามารถทำได้ สร้างแผนภาพการเชื่อมต่อ ด้วยตราของคุณ อย่างที่คุณเห็นมันไม่ซับซ้อนเลยดังนั้นจึงไม่ซับซ้อนมากเกินไป
ดังที่คุณเห็นจากแผนผังด้านบนที่ฉันวาดฉันใช้รีเลย์สองตัวและตัวกระตุ้นเชิงเส้น เส้นสี คุณเห็นแสดงสิ่งต่อไปนี้:
- แดงและดำ: นี่คือสายเคเบิลตัวกระตุ้นเชิงเส้นที่จะไปยังรีเลย์แต่ละตัวที่ใช้
- สีเทา: คุณได้เชื่อมต่อกับกราวด์หรือ GND ในรีเลย์แต่ละตัวอย่างที่คุณเห็น
- Azul: ไปที่แหล่งจ่ายไฟ Vin สำหรับรีเลย์ในกรณีนี้จะอยู่ระหว่าง 5v ถึง 12v
- สีเขียว: สาย Vcc ของโมดูลเชื่อมต่อกับ 5v ของบอร์ด Arduino ของคุณ
- สีเทา: ต่อกราวด์ด้วยเชื่อมต่อจากโมดูลไปยัง Arduino GND
- สีม่วงและสีส้ม: คือเส้นควบคุมที่จะไปที่พิน Arduino ใด ๆ เพื่อควบคุมการหมุน ตัวอย่างเช่นคุณสามารถไปที่ D8 และ D9
สำหรับตัวอย่างของ ซอร์สโค้ดสำหรับ Arduino IDE ของคุณภาพร่างสำหรับการควบคุมพื้นฐานจะเป็นดังนี้:
//configurar las salidas digitales
const int rele1 = 8;
const int rele2 = 9;
void setup()
{
pinMode(rele1, OUTPUT);
pinMode(rele2, OUTPUT);
//Poner los relés a bajo
digitalWrite(rele1, LOW);
digitalWrite(rele2, LOW);
}
void loop()
{
extendActuator();
delay(2000);
retractActuator();
delay(2000);
stopActuator();
delay(2000);
}
//Activar uno de los relés para extender el actuador
void extendActuator()
{
digitalWrite(rele2, LOW);
delay(250);
digitalWrite(rele1, HIGH);
}
//Lo inverso a lo anterior para retraer el émbolo
void retractActuator()
{
digitalWrite(rele1, LOW);
delay(250);
digitalWrite(rele2, HIGH);
}
//Poner ambos releś apagados parar el actuador
void stopActuator()
{
digitalWrite(rele1, LOW);
digitalWrite(rele2, LOW);
}
คุณ แก้ไขรหัส เพื่อให้สามารถควบคุมและจัดตำแหน่งลูกสูบในตำแหน่งเฉพาะได้หากต้องการหรือเพิ่มองค์ประกอบอื่น ๆ ...