
Cơ điện tử là một ngành học kết hợp giữa cơ khí với điện tử, là một ngành kỹ thuật đa ngành bao gồm robot, điện tử, máy tính, viễn thông, điều khiển, v.v. Để vượt ra ngoài các dự án DIY điện tử và bắt đầu thử nghiệm với các dự án cơ điện tử, bạn có thể bắt đầu tích hợp các thiết bị như động cơ o el thiết bị truyền động tuyến tính cho Arduino của bạn.
Điều đó mở ra bạn một thế giới mới của những khả năng cho các nhà sản xuất. Trên thực tế, thiết bị truyền động tuyến tính này là thiết thực nhất với khả năng thực hiện các hành động di động hoặc tác động lực lên các phần tử khác. Bạn muốn biết thêm? Chúng tôi nói với bạn ...
Các loại thiết bị truyền động tuyến tính

Có một số loại thiết bị truyền động, mặc dù trong bài viết này chúng ta sẽ tập trung vào loại sử dụng động cơ điện để dẫn động pít tông. Nhưng bạn nên biết rằng cũng có thể có các loại khác:
- Môn thủy lực: Họ sử dụng một số loại chất lỏng để di chuyển pít-tông. Ví dụ có thể là của nhiều máy nông nghiệp hoặc máy xúc, sử dụng các pít-tông này và áp suất dầu để di chuyển các tay khớp, máy ép thủy lực, v.v.
- Điện: chúng là thiết bị truyền động sử dụng một trục vít vô tận được chuyển động bởi động cơ điện để tạo ra chuyển động. Ngoài ra còn có loại điện từ (nam châm điện), sử dụng từ trường để di chuyển pít-tông hoặc pít-tông và lò xo để đưa nó trở lại vị trí ban đầu khi không tác dụng từ trường đó. Một ví dụ thực tế có thể là ví dụ cuối cùng mà tôi trình bày trong bài viết này, hoặc nhiều ví dụ khác về người máy, thiết bị cơ khí thông thường, v.v.
- Lốp xe: chúng sử dụng không khí như một chất lỏng, thay vì chất lỏng như trong trường hợp thủy lực. Một ví dụ trong số này là các thiết bị truyền động tuyến tính điển hình được tìm thấy trong các xưởng công nghệ của một số trung tâm giáo dục.
Mục tiêu cuối cùng của thiết bị này là biến đổi một năng lượng thủy lực, điện hoặc khí nén trong một lực đẩy tuyến tính trong trường hợp này, do đó tác dụng lực, lực đẩy, hoạt động như một bộ điều chỉnh, kích hoạt một số cơ chế khác, v.v.
Giới thiệu về thiết bị truyền động tuyến tính điện tử
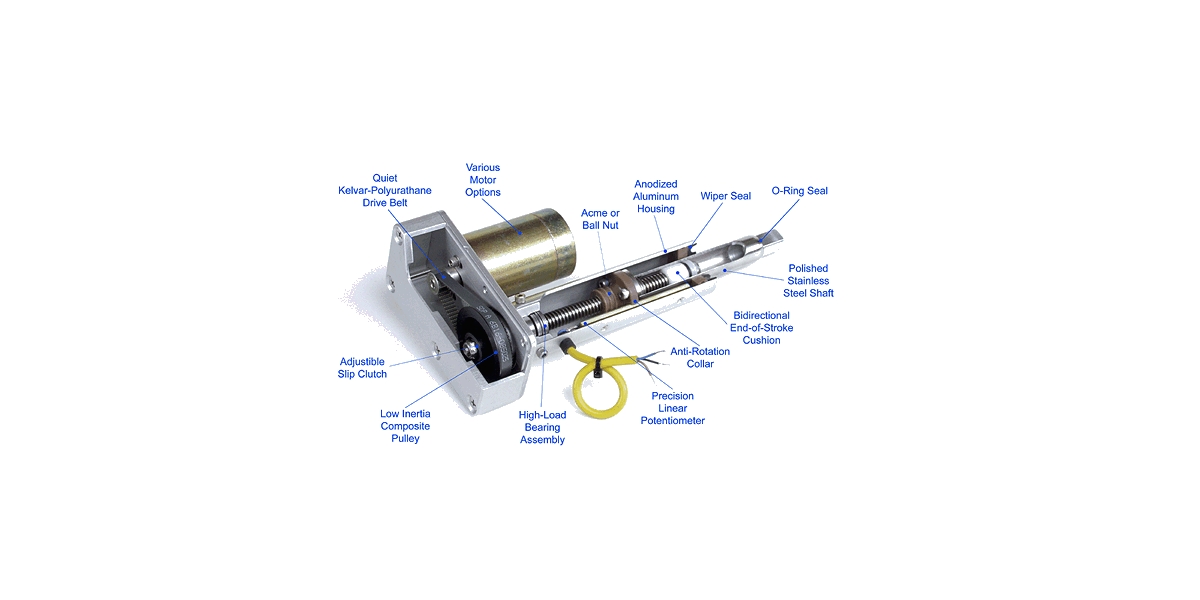
Về cơ bản một thiết bị truyền động tuyến tính điện nó không hơn gì một động cơ điện, đôi khi có thể là một NEMA như đã thấy. Động cơ này quay trục của nó, và nhờ sự kết hợp của các bánh răng hoặc xích có răng, nó sẽ quay một trục vít vô tận. Trục vít vô tận này sẽ làm nhiệm vụ trượt piston hoặc thanh truyền theo hướng này hay hướng khác (tùy thuộc vào chiều quay).
Đó thợ lặn nó sẽ là thứ đóng vai trò như một thiết bị truyền động để đẩy một cái gì đó, để kéo một cái gì đó, để tác động một lực, v.v. Các ứng dụng khá rộng. Như bạn có thể thấy, nó là một cái gì đó khá đơn giản và không chứa quá nhiều bí ẩn.
Những thiết bị truyền động tuyến tính này, không giống như những thiết bị phi tuyến tính khác, có lợi thế là có thể tác động lực và độ dịch chuyển lớn đáng kể (tùy thuộc vào kiểu máy). Nhưng đối với Arduino, bạn có một số mô hình có thể đi từ 20 đến 150 Kgf (kg lực hoặc kilopond) và độ dịch chuyển từ 100 đến 180 mm.
Như một bất lợi lớn là của nó vận tốc dịch chuyểnBởi vì bằng cách tác động những lực to lớn này, các bánh xe giảm tốc cần thiết để tăng mô-men xoắn sẽ làm giảm tốc độ kéo dài và thu lại. Tốc độ từ 4 đến 20 mm / s có thể được cung cấp trên các mẫu điển hình. Điều này có nghĩa là để hoàn thành toàn bộ quá trình tuyến tính, nó có thể mất từ vài chục giây đến vài phút trong trường hợp lâu hơn và chậm hơn ...
Đối với anh ấy cho ăn, bạn có chúng với nhiều điện áp hoặc điện áp khác nhau. Ví dụ, điều thông thường là chúng là 12 hoặc 24v, mặc dù bạn có thể tìm thấy một số bên dưới và bên trên đó. Về mức tiêu thụ của chúng, chúng có thể nằm trong khoảng từ 2A đến 5A trong một số trường hợp. Như bạn có thể thấy, là một động cơ mạnh mẽ, mức tiêu thụ cao ... Vì vậy, nếu bạn định nuôi nó có pin, bạn phải xem xét rằng họ có đủ năng lực cần thiết.
Điều khiển thiết bị truyền động tuyến tính
Bộ truyền động tuyến tính điện bạn có thể tìm thấy cho Arduino có thể có nhiều loại điều khiển:
- Có chiết áp: bằng chiết áp mà chúng cho phép chọn vị trí của piston.
- Khi kết thúc sự nghiệp: một công tắc giới hạn ở mỗi đầu sẽ tự dừng lại khi đạt đến đỉnh.
- Mất kiểm soát: họ không có bất kỳ hệ thống kiểm soát nào ở trên.
pinout
El pinout của một thiết bị truyền động tuyến tính không thể đơn giản hơn. Nó có hai dây cáp dẫn điện để cấp nguồn cho động cơ điện mà nó tích hợp, và không có gì hơn thế. Do đó, không có biến chứng. Điều duy nhất cần lưu ý để kéo dài hoặc thu lại thân là vòng quay của động cơ phải được đảo ngược (cực hiện tại).
Để điều đó thành có thể, bạn có thể sử dụng bộ điều khiển cầu H giống như loại được sử dụng cho động cơ dòng điện một chiều. Bạn có thể nghĩ rằng một người như anh ta phục vụ bạn L298Nbạn những người khác đã thấy, chẳng hạn như TB6612FNG, v.v. Nhưng sự thật là không ai trong số chúng có đủ công suất cho các bộ truyền động tuyến tính này (nếu chúng lớn). Do đó, bộ điều khiển sẽ bị cháy.
Do đó, bạn chỉ có thể xây dựng kiểm soát tốc độ của riêng bạn sử dụng các bóng bán dẫn như BJT hoặc MOSFET, và thậm chí rơ le thể rắn ...
Mua thiết bị truyền động tuyến tính ở đâu?
El Giá của cơ cấu truyền động tuyến tính sẽ phụ thuộc phần lớn vào kích thước, tốc độ, chiều dài và cả lực mà nó có thể chịu được. Bạn thường có thể tìm thấy chúng từ khoảng € 20 đến € 200. Và bạn sẽ dễ dàng tìm thấy chúng trong các cửa hàng điện tử chuyên dụng hoặc trong các cửa hàng trực tuyến khác như Amazon. Ví dụ:
- Bộ truyền động điện từ Sourcingmap có khả năng tạo lực 400g và 4mm
- Bộ truyền động tuyến tính Justech DC 12V lên đến 72kg và hành trình 150mm
- LHQ-HQ DC 12v với sức chứa 80 kg và 50mm hành trình
- Hỗ trợ Seafront 12V lên đến 300mm và trọng lượng 150kg (ước tính cho 50mm)
- Không tìm thấy sản phẩm.
Nhiều sản phẩm trong số này được bảo vệ chống lại bụi và bắn tung tóe bằng chứng chỉ IPX54. Và hãy nhớ khuyến nghị của nhà sản xuất, các trọng lượng được chỉ định không phải lúc nào cũng được hỗ trợ cho tất cả các độ dài phần mở rộng, trong một số trường hợp, chỉ một trọng lượng giới hạn nhất định được hỗ trợ cho đến một phần mở rộng nhất định.
Tích hợp với Arduino
Các loại bộ truyền động này có thể có nhiều mục đích sử dụng thực tế khác nhau nếu bạn tích hợp chúng với bảng Arduino của mình. Để làm được điều này, điều đầu tiên bạn nên biết là cách mà bạn có thể tạo sơ đồ kết nối với huy hiệu của bạn. Như bạn có thể thấy, nó không phức tạp ở tất cả, vì vậy nó không có quá nhiều biến chứng.
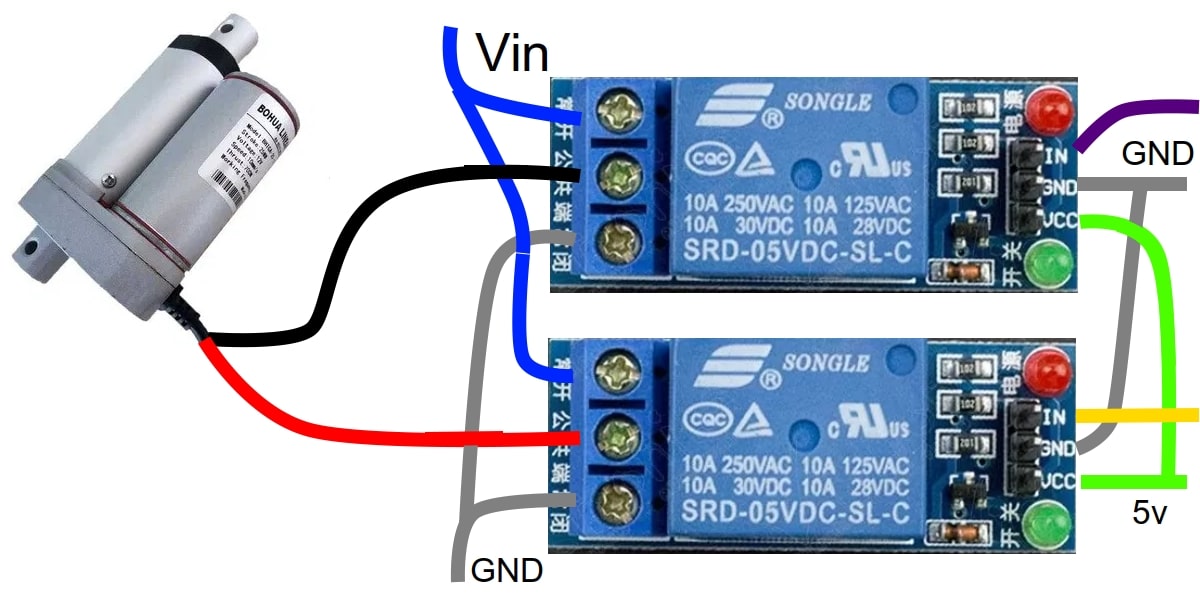
Như bạn có thể thấy từ sơ đồ trên mà tôi đã vẽ, tôi đã sử dụng hai rơ le và một bộ truyền động tuyến tính. Các đường màu bạn thấy đại diện cho những điều sau:
- đỏ và đen: đây là các cáp của bộ truyền động tuyến tính sẽ đi đến từng rơ le được sử dụng.
- Màu xám: bạn đã kết nối với đất hoặc GND trong mỗi rơle như bạn có thể thấy.
- Azul: nó đi vào nguồn cấp điện Vin cho rơ le, trong trường hợp này nó sẽ nằm trong khoảng từ 5v đến 12v.
- Verde: các dòng Vcc của mô-đun được kết nối với 5v của bảng Arduino của bạn.
- Màu xám: cũng nối đất, được kết nối từ mô-đun đến Arduino GND.
- Tím và cam: là các dòng điều khiển sẽ đi đến bất kỳ chân nào của Arduino để điều khiển vòng quay. Ví dụ, bạn có thể chuyển đến D8 và D9.
Đối với ví dụ của mã nguồn cho Arduino IDE của bạn, bản phác thảo cho điều khiển cơ bản sẽ như sau:
//configurar las salidas digitales
const int rele1 = 8;
const int rele2 = 9;
void setup()
{
pinMode(rele1, OUTPUT);
pinMode(rele2, OUTPUT);
//Poner los relés a bajo
digitalWrite(rele1, LOW);
digitalWrite(rele2, LOW);
}
void loop()
{
extendActuator();
delay(2000);
retractActuator();
delay(2000);
stopActuator();
delay(2000);
}
//Activar uno de los relés para extender el actuador
void extendActuator()
{
digitalWrite(rele2, LOW);
delay(250);
digitalWrite(rele1, HIGH);
}
//Lo inverso a lo anterior para retraer el émbolo
void retractActuator()
{
digitalWrite(rele1, LOW);
delay(250);
digitalWrite(rele2, HIGH);
}
//Poner ambos releś apagados parar el actuador
void stopActuator()
{
digitalWrite(rele1, LOW);
digitalWrite(rele2, LOW);
}
Anh sửa đổi mã để có thể điều khiển và định vị pít-tông ở những vị trí cụ thể nếu bạn muốn, hoặc thêm nhiều yếu tố khác ...