
Mekatroniikka on tieteenala, joka sekoittaa mekaniikan elektroniikkaan ja on monitieteinen tekniikan ala, joka hyödyntää robotiikkaa, elektroniikkaa, tietojenkäsittelyä, televiestintää, ohjausta jne. Voit aloittaa sähköisten DIY-projektien ja kokeilla mekatroniikkaprojekteja pidemmälle laitteita kuten moottorit tai lineaarinen toimilaite Arduinollesi.
Se avaa sinut uusi mahdollisuuksien maailma päättäjille. Itse asiassa tämä lineaarinen toimilaite on käytännöllisin kyvyllä suorittaa liikkuvia toimintoja tai käyttää voimaa muihin elementteihin. Haluatko tietää enemmän? Kerromme sinulle ...
Lineaaristen toimilaitteiden tyypit

Toimilaitteita on useita, vaikka tässä artikkelissa keskitymme siihen, joka käyttää sähkömoottoria männän käyttämiseen. Mutta sinun pitäisi tietää, että voi olla myös muita tyyppejä:
- Hydrauliikka: He käyttävät jonkinlaista nestettä männän liikuttamiseen.Esimerkki voi olla monien maatalouskoneiden tai kaivinkoneiden esimerkki, jossa käytetään näitä mäntiä ja öljynpainetta nivellettyjen varsien, hydraulipuristimien jne. Liikuttamiseen.
- sähkö-: ne ovat toimilaitteita, jotka käyttävät sähkömoottorin liikuttamaa loputonta ruuvia liikkeen tuottamiseen. On myös solenoidityyppiä (sähkömagneetti), joka käyttää magneettikenttää männän tai männän siirtämiseen ja jousi palauttamaan sen alkuperäiseen asentoonsa, kun kyseistä kenttää ei käytetä. Käytännön esimerkki voi olla viimeinen esimerkki, jonka esitän tässä artikkelissa, tai myös monet muut robotiikasta, tavallisista mekaanisista laitteista jne.
- renkaat: ne käyttävät ilmaa nesteenä nesteen sijasta kuten hydrauliikan tapauksessa. Esimerkki näistä ovat tyypilliset lineaariset toimilaitteet, jotka löytyvät joidenkin koulutuskeskusten teknologiapajoista.
Tämän laitteen perimmäinen tavoite on muuttaa energiaa hydraulinen, sähköinen tai pneumaattinen lineaarisessa työntövoimassa tässä tapauksessa, mikä käyttää voimaa, työntövoimaa, toimii säätimenä, aktivoi jonkin muun mekanismin jne.
Tietoja sähköisestä lineaarisesta toimilaitteesta
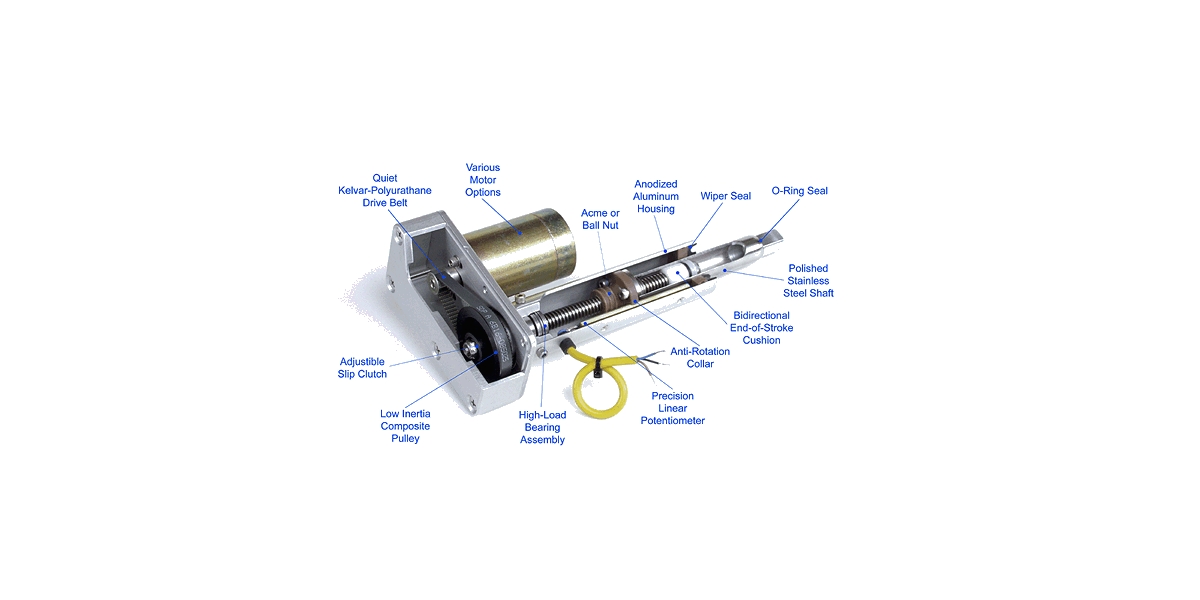
Pohjimmiltaan a sähköinen lineaaritoimilaite se ei ole muuta kuin sähkömoottori, joskus voi olla NEMA kuten jo nähtiin. Tämä moottori kääntää akseliaan, ja hammaspyörien tai hammasketjujen yhdistelmällä se kääntää loputtoman ruuvin. Tämä loputon ruuvi on vastuussa männän tai tangon liu'uttamisesta yhteen tai toiseen suuntaan (pyörimissuunnasta riippuen).
ESE mäntä se toimii toimilaitteena työntämään jotain, vetämään jotain, kohdistamaan voimaa jne. Sovellukset ovat melko laajoja. Kuten näette, se on jotain aivan yksinkertaista, joka ei sisällä liian monta mysteeriä.
Näillä lineaarisilla toimilaitteilla, toisin kuin muilla epälineaarisilla, on etu, että ne pystyvät käyttämään suuret voimat ja siirtymät huomattava (mallista riippuen). Mutta Arduinolle sinulla on joitain malleja, jotka voivat nousta 20-150 Kgf: iin (kilogramman voima tai kilopond) ja siirtymät 100-180 mm.
Koska suuri haitta on sen siirtymän nopeusKoska näitä valtavia voimia käytettäessä vääntömomentin lisäämiseksi tarvittavat alennuspyörät aiheuttavat pidennysnopeuden ja vetäytymisen pienemmäksi. Nopeudet 4-20 mm / s voidaan antaa tyypillisissä malleissa. Tämä tarkoittaa, että koko lineaarisen prosessin loppuun saattamiseksi se voi kestää muutamasta sekunnista muutamaan minuuttiin, jos se on pidempi ja hitaampi ...
Mitä hänen ruokinta, sinulla on niitä eri jännitteillä tai jännitteillä. Esimerkiksi tavallinen asia on, että ne ovat 12 tai 24v, vaikka löydät alla ja yläpuolella. Kulutuksen suhteen ne voivat vaihdella välillä 2A - 5A joissakin tapauksissa. Kuten näette, tehokas moottori on kulutus suuri ... Joten jos aiot syöttää sitä paristoilla, sinun on otettava huomioon, että heillä on tarvittava kapasiteetti.
Lineaarinen toimilaitteen ohjaus
Arduinolle löytyvällä sähköisellä lineaarisella toimilaitteella voi olla erityyppisiä ohjaus:
- Potentiometrillä: Potentiometrin avulla ne voivat valita männän asennon.
- Uran päättyessä: rajakytkin kummassakin päässä saa sen pysähtymään itsestään, kun se saavuttaa huipun.
- Hallitsematon: heillä ei ole mitään edellä mainituista ohjausjärjestelmistä.
Sokka irti
El Sokka irti lineaarisen toimilaitteen malli ei voisi olla yksinkertaisempi. Siinä on kaksi johtavaa kaapelia syöttämään sähkömoottori, jonka se integroi, eikä mitään muuta. Siksi nolla komplikaatiota. Ainoa asia, joka on pidettävä mielessä varren pidentämiseksi tai vetämiseksi sisään, on se, että moottorin pyöriminen on käännettävä päinvastaiseksi (nykyinen napaisuus).
Jotta se olisi mahdollista, voit käytä H-sillan ohjainta kuten tasavirramoottoreissa käytetty. Saatat ajatella, että joku hänen kaltaisensa palvelee sinua L298N, u muut kuten TB6612FNG jne. Mutta totuus on, että millään heistä ei ole tarpeeksi tehoa näille lineaarisille toimilaitteille (jos ne ovat suuria). Siksi ohjain palaa.
Siksi voit vain rakentaa oma nopeudenhallinta käyttämällä transistoreita, kuten BJT tai MOSFET, ja jopa releet kiinteä tila ...
Mistä ostaa lineaarinen toimilaite?
El precio lineaarisen toimilaitteen suuruus riippuu suurelta osin koosta, nopeudesta, pituudesta ja myös voimasta, jota se kestää. Löydät ne yleensä noin 20-200 €. Ja löydät ne helposti erikoistuneista elektroniikkaliikkeistä tai muista verkkokaupoista, kuten Amazon. Esimerkiksi:
- Lähdekartan solenoiditoimilaite, joka pystyy käyttämään 400 g: n ja 4 mm: n voimaa
- Justech DC 12V lineaaritoimilaite jopa 72 kg: n ja 150 mm: n liikkeeseen
- LHQ-HQ DC 12v, kapasiteetti 80 kg ja 50 mm matkalle
- Merenranta 12 V, jopa 300 mm ja 150 kg tuettua painoa (arvioitu 50 mm: lle)
- Tuotteita ei löytynyt.
Monet näistä tuotteista ovat suojattuja pöly ja roiskeet IPX54-varmenteella. Pidä mielessä valmistajan suositukset: ilmoitettuja painoja ei aina tueta kaikilla pidennyksillä, joissakin tapauksissa vain tietty rajapaino on tuettu tiettyyn pidennykseen saakka.
Integrointi Arduinon kanssa
Tämän tyyppisillä toimilaitteilla voi olla monipuolinen käytännön käyttö, jos integroit ne Arduino-korttiisi. Tätä varten sinun on ensin tiedettävä tapa, jolla voit tee liitäntäkaavio merkkisi kanssa. Kuten näette, se ei ole lainkaan monimutkainen, joten se ei aiheuta liikaa komplikaatioita.
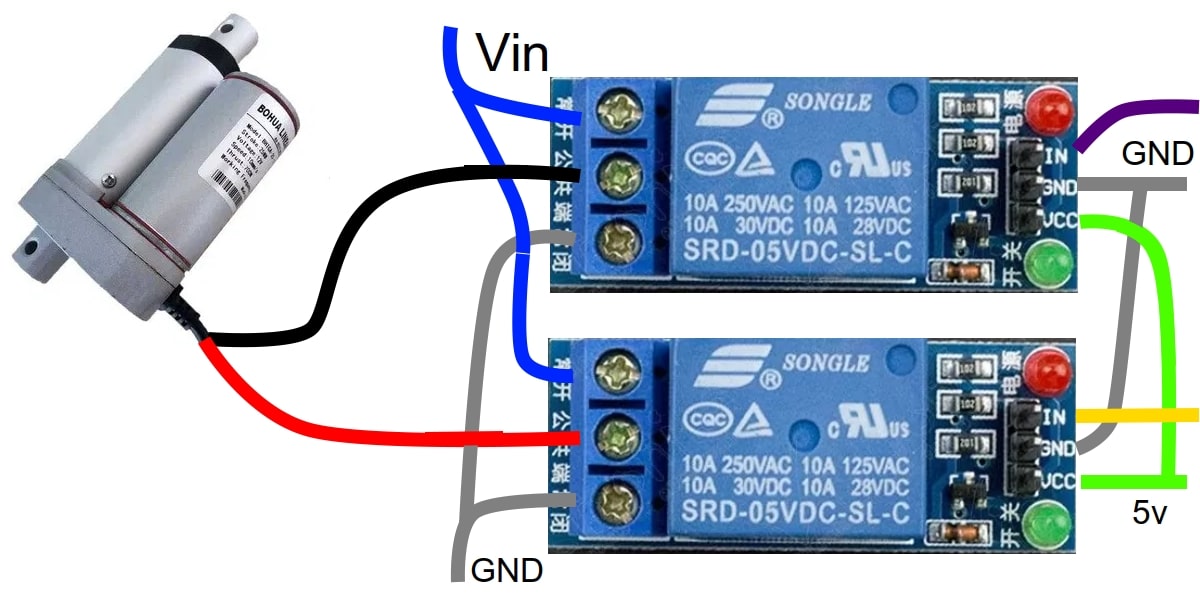
Kuten yllä olevasta piirtämästä kaaviosta näet, olen käyttänyt kahta relettä ja lineaarista toimilaitetta. värilliset viivat näet seuraavat:
- punainen ja musta: ovatko lineaarisen toimilaitteen kaapelit, jotka menevät kuhunkin käytettyyn releeseen.
- Harmaa: olet kytkenyt maahan tai GND: hen jokaisessa releessä, kuten näet.
- Azul: se menee releen virtalähteeseen Vin, tässä tapauksessa se on välillä 5v - 12v.
- Verde: moduulin Vcc-linjat on kytketty Arduino-korttisi 5v: hen.
- Harmaa: myös maadoitettu, kytketty moduulista Arduino GND: hen.
- Violetti ja oranssi: ovatko ohjauslinjat, jotka menevät mihin tahansa Arduino-nastasta pyörityksen ohjaamiseksi. Voit esimerkiksi siirtyä kohtaan D8 ja D9.
Mitä tulee esimerkkiin lähdekoodisi Arduino IDE: lle, perussäätimen luonnos olisi seuraava:
//configurar las salidas digitales
const int rele1 = 8;
const int rele2 = 9;
void setup()
{
pinMode(rele1, OUTPUT);
pinMode(rele2, OUTPUT);
//Poner los relés a bajo
digitalWrite(rele1, LOW);
digitalWrite(rele2, LOW);
}
void loop()
{
extendActuator();
delay(2000);
retractActuator();
delay(2000);
stopActuator();
delay(2000);
}
//Activar uno de los relés para extender el actuador
void extendActuator()
{
digitalWrite(rele2, LOW);
delay(250);
digitalWrite(rele1, HIGH);
}
//Lo inverso a lo anterior para retraer el émbolo
void retractActuator()
{
digitalWrite(rele1, LOW);
delay(250);
digitalWrite(rele2, HIGH);
}
//Poner ambos releś apagados parar el actuador
void stopActuator()
{
digitalWrite(rele1, LOW);
digitalWrite(rele2, LOW);
}
Sinä muokata koodia pystyä ohjaamaan ja sijoittamaan mäntää tiettyihin paikkoihin, jos haluat, tai lisäämään lisää elementtejä ...