
Számtalan készlet létezik a robotok összeállítására vagy projektekre a robotika közelebb visz otthoni vagy oktatási környezetben. Egy nagyon érdekes ilyen típusú projekt kame robot, egy négylábú, amelyet 3D nyomtatójával nyomtathat. Ezen kívül ez a kezdeményezés spanyol, jön ki B.Q. Labs és sok más érdekes vonatkozással.
Ha még mindig nem ismerte ezt a robotot, itt egy kicsit többet megtudhat róla, és még másokat is megismerhet meglévő alternatívák és még sok más…
Mi az a Kame robot?
A Kame robot egy spanyol projekt, egy négylábú robottípus, amelyet az Arduino IDE-nek köszönhetően programoznak, és amelynek alkatrészei nyomtathatók 3D nyomtató. Ezenkívül a népszerűségen alapul NodeMCU ESP8266 modul WiFi kapcsolat biztosításához és a számítógépről küldött parancsok segítségével történő vezérléséhez. Szükséged lesz egy kis Li-Po akkumulátorra is áramforrásként.
Másrészt van teljes mobilitás, 8 DOF (szabadságfok), oszcillátor alapú algoritmusok, valamint különféle mozgások végrehajtásának lehetősége, az előre-hátra mozgástól, a fordulástól az ugrásig, táncolásig stb. És hogy mindez lehetséges legyen, 8 van benne szervomotorok, mindkét lábára 2-XNUMX. A motorok az elfordulási tengelyen, egy másik pedig a gördülési tengely csuklós paralelogrammáján helyezkedtek el.
Tervezéséhez ingyenes szoftvert használtak, hiszen FreeCAD segítségével készült, és úgy gondolták, hogy bárki, akinek a 3D nyomtató képes létrehozni. Valójában a tervfájljai nyílt forráskódúak, a Creative Commons BY-SA licenc alatt. És mindez Javier Isabelnek és a BQ Labsnak köszönhető, akik az építészek.
Hogyan szereljük össze a Kame robotot
A projekt repójában megtalálható az utasítások a Kame robot összeállításához és programozásához szükséges, valamint az alkatrészek tervét tartalmazó fájlokat, amelyeket letölthet és nyomtathat a 3D nyomtatóra. Konkrétan van 9 .stl fájl, a testre, a láb különböző részeire stb.
A szerkezeti részek kinyomtatása mellett a Kame robot befejezéséhez mást is be kell szereznie Elektromos alkatrészek életet adni (lehet ilyen márkájú vagy azonos tulajdonságú):
- 1 ESP8266 NodeMCU modul
- 8 Turnigy TGY-396G-HV ultragyors szervó
- 1 db Turnigy Nano-Tech 460 mAh 2S akkumulátor
- Csavarok és menetek:
- 8 db M2 4MM hatlapfejű csavar
- 32 db M2 6 mm-es hatlapfejű csavar
- 10 db M3 8 mm-es hatlapfejű csavar
- 12 db M3 30 mm-es hatlapfejű csavar
- 4 M3 menet
- 18 M3 nyloc menet
- Nem található termék.
- 2 x 12 mm-es szemmatrica (Nem kötelező)
Alternatívák és hasonló projektek (printbotok)
Egyéb alternatív printbotok a Kame robothoz amelyek nyomtathatók és nyílt forráskódúak:
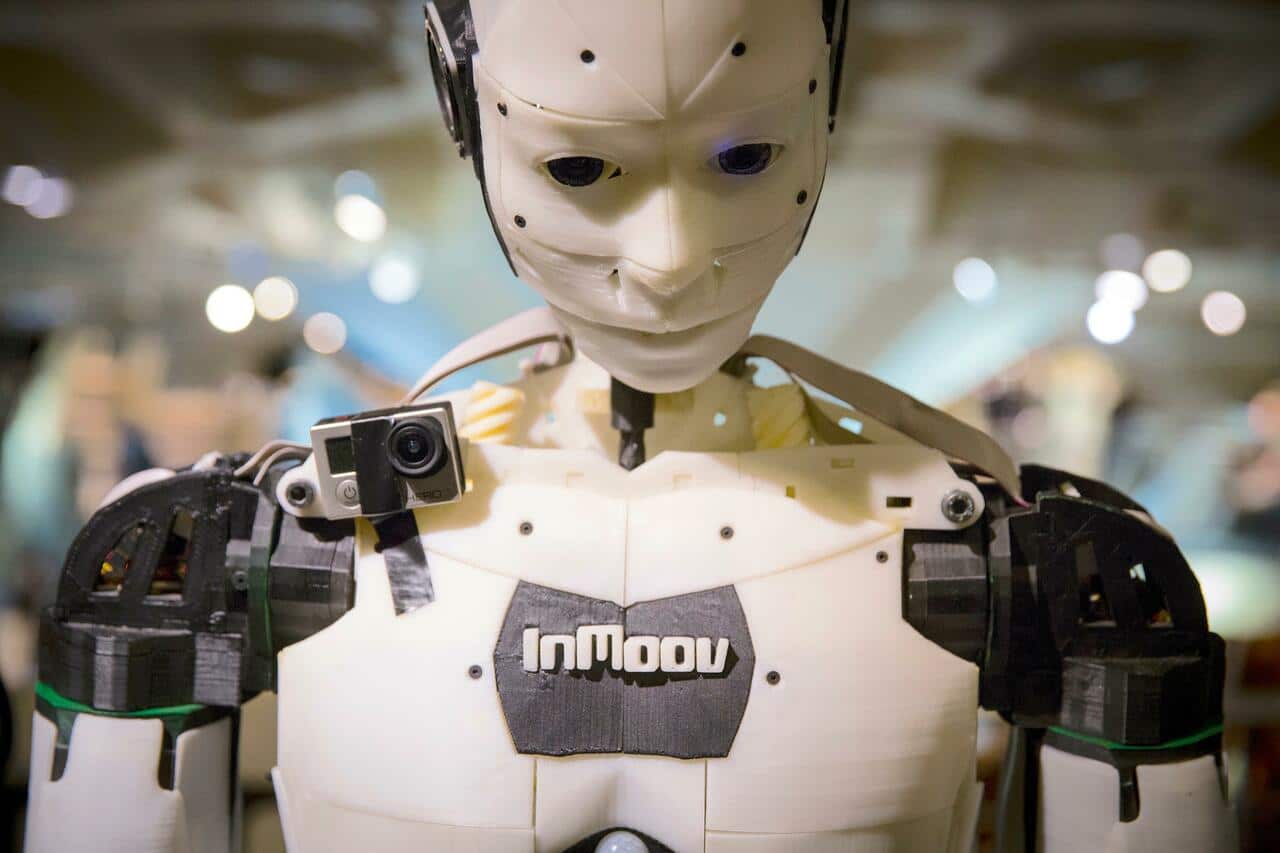
- inmoov: Ez egy 3D-s nyomtatható robotprojekt, amely körülbelül 800 euróért létrehozható, és Arduino-val vezérelhető. Ennek a robotnak humanoid teste van, nagy, és a francia Gaël Langevin készítette.
- farmbot: Ez több, mint egy robot, mivel ez egy teljes nyílt forráskódú és nyomtatható mezőgazdasági projekt. Ennek a projektnek köszönhetően otthoni kertet alakíthat ki CNC automatizálással.
- iCub: Ez egy nyílt forráskódú robot "gyermek", amely AI algoritmusokat használ a funkcióihoz. Egy 4 éves fiút szimulál, 1.04 méter magas és 22 kiló súlyú.
- Darwin-OP- Egy másik nyílt forráskódú platform a végtelen mozgásra képes humanoid robotok építésére, beleértve a focizást, felkelést, ha elesik, stb. Romela Lab készítette, 45 cm magas és 2.9 kg súlyú.
- miniskybot- Nyomtatható, nyílt forráskódú, oktatási robot. Ezenkívül ingyenes eszközöket használtak a tervezéshez, mint például a Linux, az OpenSCAD, a FreeCAD, a KiCAD és az SDCC fordító a C programozáshoz.