多くの電子プロジェクトにはガバナンスの要素が必要であり、それは ジャイロまたはジャイロスコープ。 この要素は、デバイスの動きや回転を検出し、この動きに対する反応を生成するのにも役立ちます。 たとえば、コマンドの場合、ユーザーが要素やビデオゲームを制御したい方向に回転する可能性があります。
ラス ジャイロスコープのアプリケーションご想像のとおり、スマートフォンで統合されたものなど、画面が回転したことを認識してオペレーティングシステムで何らかの制御アクションを実行したり、車両やビデオゲームのキャラクターを処理したりすることができます。 また、一部のラップトップには、機器が落下したことを確認するために統合されているため、ハードディスク(HDD)の電源を時間内にオフにして、ヘッドが回転ディスクにぶつかったり壊れたりするのを防ぐことができます。
彼らはまた使用することができます 誘導システム、デバイスがどこに向かっているのかを知るため。 これは、自律型ロボットと、介入なしまたはユーザーの介入付きで適切に方向付けする必要があるその他のシステムの両方に役立ちます。 ドローンには、このタイプの要素がインストールされており、仮想現実メガネ、拡張現実または複合現実でさえ、ユーザーの動きに応じて見られる画像を適応させることができます...
また、 軍事産業 これらのジャイロスコープのおかげで、より良い方法でターゲットに向けることができる最初のロケットやミサイルを誘導できるなど、多くの用途がありました。 さらに、これは、GPSなどの最新の衛星システムと組み合わせて、非常に高い精度を持つことができます。
ご覧のように、 アプリケーションはたくさんあります、そして確かにあなたはメーカーとして、あなたの将来のDIYプロジェクトのためにあなたの頭の中にもっとあります...
少し歴史
El オリエンテーションの感覚 それは何年もの間、特にナビゲーションで必要でした。 最初のシステムは、イギリスのジョン・サーソンによるXNUMX世紀のもののようなこまに基づいていました。 それを使って、彼は視界が低下したりヌルになったりしたときに公海の地平線を見つけることができるように、こまに別の用途を与えようとしました。
オリエンテーションデバイスは、最初のジャイロスコープがそのようになるまで少しずつ進化していました。 1852年まで上がるだろう、フーコーの発明で。 それは地球の自転を実証するための実験の産物として現れました。 簡単な方法でその回転を示すことができる振り子を持つ要素。
魚雷やミサイル用の航空産業や軍事産業の急増に伴い、機械装置は少しずつ進化してきました。 この意味で強調する必要があります スペリーコープジャイロ、軍事産業にとって、それは最初の方向性と現代の概念のXNUMXつになりました。
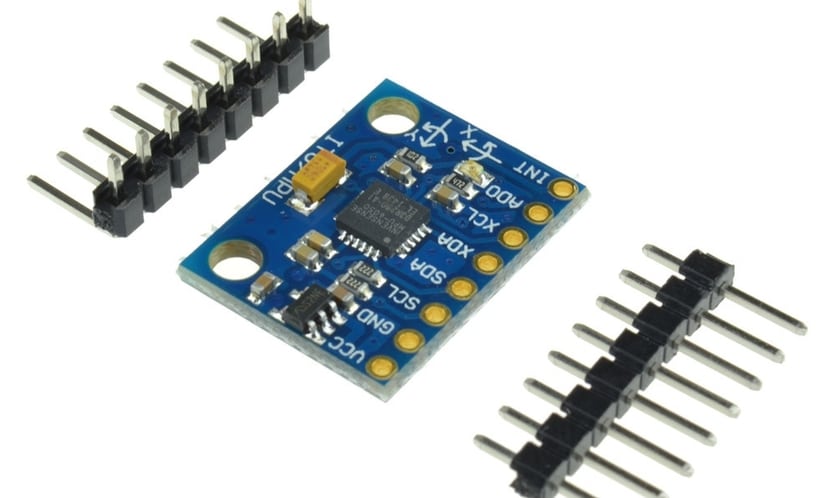
その後、現在のシステムに到達するまで、洗練され、サイズが縮小され、精度が向上し始めます。 MEMSなどの技術のおかげで電子的で小型化。 これから私たちはすでに何かを見ました MPU6050アイテム このブログから。
ジャイロスコープはどのように機能しますか?
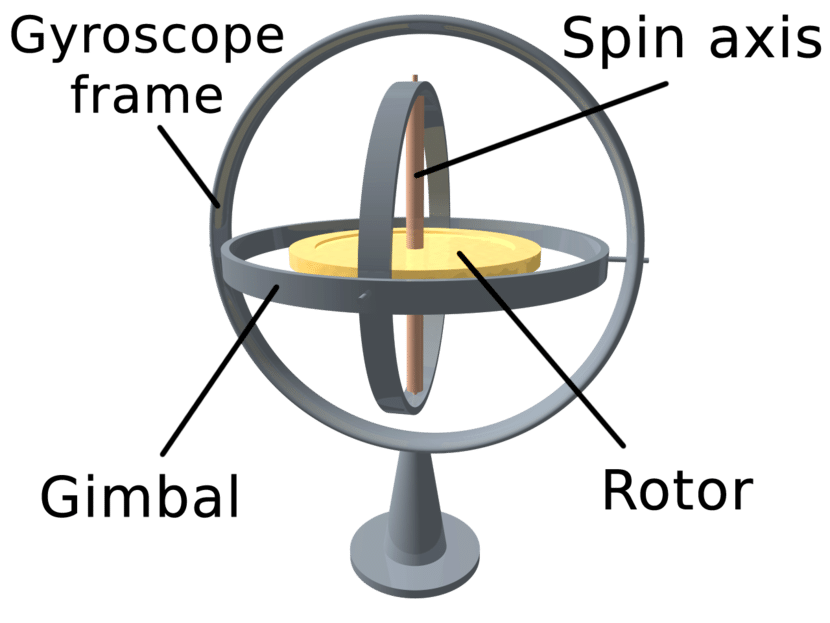
ジャイロスコープまたはジャイロスコープは、 ジャイロスコープ効果。 これは、水平軸上にディスクを搭載し、その周りをディスクが高速で自由に回転することで発生する現象です。 観察者が背景の軸を左手で、正面の軸を右手で維持している場合、右手を下げて左を上げると、非常に独特な行動を感じるでしょう。
オブザーバーが感じるのは ジャイロスコープは右手を押し、左手を引っ張ります。 これは、ジャイロスコープ効果として知られているものです。 動作中に高速回転(7200RPM)のメカニカルハードディスク(HDD)を手に持ったことがあるかどうかはわかりませんが、動かすと慣性があるのは確かです。このように私はここであなたに話します...
さて、この現象は、動きがいつ発生するかを知ることができるように、従来のジャイロスコープによって使用されます。 現在ですが 組み込みマイクロエレクトロニクスデバイス この記事で言及されている技術デバイスでは、それらは、単位時間あたりの角変位、または異なる効果を使用して物体がその軸を中心に回転する速度をキャプチャする高度な要素です。
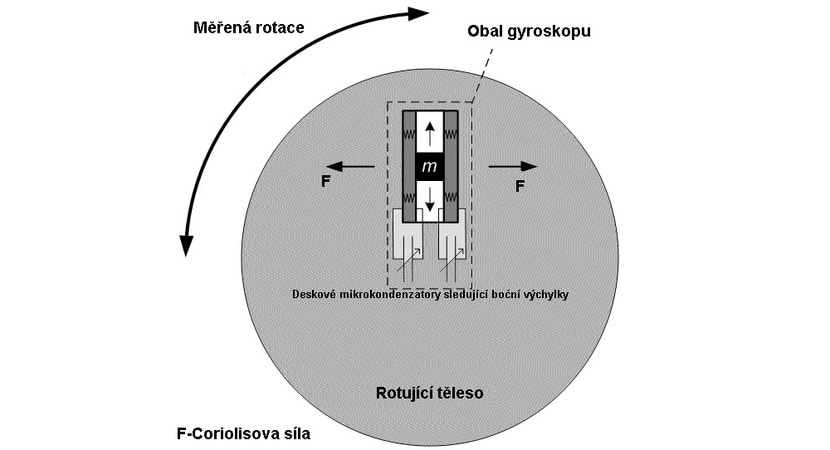
彼らはおかげで非常に良い精度を得る 既知の効果を持つMEMSはコリオリのように見えます。 この場合、1836年にフランス人ガスパールギュスターヴコリオリスによって発見されました。この効果は、回転座標系で、物体が基準座標系に対して動いているときに観察されます。 それは、前記回転システムにおける身体の相対的な加速度からなる。 この加速度は、常にシステムの回転軸と体の速度に垂直になります。
この場合のオブジェクトは、回転するオブザーバーの観点から、オブジェクトに非現実的な力が加わって加速するかのように加速されます。 これは、慣性または架空のタイプのコリオリの力であり、そのおかげで次のことが可能になります。 角速度を測定し、 時間、角変位、または単にオブジェクトが移動したかどうかを知ることに関して角速度を積分する..。
具体的には、 MEMS型センサー、内部に1〜100マイクロメートルの範囲のサイズ、つまり人間の髪の毛よりもさらに小さいジャイロスコープが実装された小さなチップがあります。 このデバイスは、回転すると、角速度の変化に伴って小さな共振質量が移動し、制御回路によって読み取られて解釈される非常に低い電流の電気信号を生成するのに十分です。
ジャイロスコープで観察する必要のある特性

考慮すべきいくつかの特性 ジャイロを選ぶ あなたのプロジェクトesonのために:
- ランゴ:測定できる最大角速度は、選択したジャイロスコープの最大範囲を超えてはなりません。 ただし、可能な限り最高の感度も必要です。これは、ジャイロの範囲を必要以上に高くしないことで実現されます。
- インターフェース:市場に出回っているジャイロスコープの95%はアナログ出力を備えていますが、SPIタイプまたはI2Cバスのデジタルインターフェースを備えたものもあるため、それほど問題にはなりません。
- 車軸の数:加速度計のように、それは非常に重要なことです。 それらは通常、加速度計の場合ほど多くの軸を利用できませんが、より良いです。 最近、いくつかの3軸が現れ始めました。これは非常に良いことです。 ただし、ほとんどのモデルには1つまたは2つの軸があり、ほとんどのプロジェクトにはこれで十分です。 3軸のものでは、モデル情報を参照して、どの軸が回転を測定するかを知る必要があります。他のXNUMXつはオブジェクトのピッチとロールを測定でき、別の軸はピッチとヨーを測定できるためです。
- 消費:プロジェクトがバッテリーまたはセルに依存している場合は、エネルギーをほとんど消費しないものを選択する必要があるため、もう100つの重要な特性です。 一般的にはそれほど多くはなく、平均消費量は通常約XNUMXマイクロアンペアです。 いくつかのより高度なものは、使用されていないときにパワーサスペンド機能を備えています。
- 付属品:同じモジュール内に、加速度センサー、温度計などの追加機能がある場合があります。
また、購入した場合 モドゥロスそれらには、Arduinoとの統合を容易にするいくつかの追加機能を備えたチップとPCBがあります。たとえば、接続ピンや電源ピンなどを提供します。
あなたが買うことができるジャイロ
いくつかの あなたが買うことができるジャイロ として MPU6050 これには加速度計も含まれています。 すでに別の記事で説明しましたが、それ以外にも、Arduinoと一緒に電子プロジェクトに簡単に統合できるものがあります。
- あなたはのようなジャイロを買うことができます STマイクロエレクトロニクスLPY503AL。 それは最も人気のあるもののXNUMXつであり、 ここでそのデータシートを読むことができます.
- あなたも使うことができます 慣性センサー として 製品が見つかりません。,製品が見つかりません。 e 製品が見つかりません。、MPU6050に加えて..。
Arduinoとの接続と統合は、各モデルとメーカーによって異なります。 しかし、それは複雑ではありません。 あなたは彼らをチェックすることができます データシートとピン配置 それらを管理する方法を知るために。 問題は、角変位を計算する方法を知るためにそれらがどのように機能するか、そしてArduino IDEのコードがそれを解釈し、それに応じてアクションを生成することを知ることです...