
Arduino는 매우 초보적으로 보일 수 있지만 상당히 진보 된 프로젝트를 만드는 데 충분합니다. 카메라 모듈과 같은 시장에 나와있는 일부 모듈의 도움과 일부 라이브러리 또는 API의 도움으로 프로젝트에 인텔리전스 또는 인공 시력. 이는 초보적인 프로젝트를 넘어 새로운 응용 프로그램과 새로운 지평을 제공 할 것입니다.
머신 비전은 컴퓨터 비전의 한 유형입니다. 단순히 디지털 카메라를 통해 이미지를 캡처하는 것이 아니라 더 나아갑니다. 사용할 수 있습니다 환경 데이터 수집, 이미지 처리, 분석, 실제 이미지 이해 등 예를 들어 카메라를 통해 수치 정보를 얻고 사람을 인식하는 데 사용할 수 있습니다. 이것으로 할 수있는 모든 것을 상상해보십시오 ...
컴퓨터 비전은 무엇에 사용됩니까?
로 ejemplo, 현재의 많은 비전 시스템은 이러한 유형의 비전을 기반으로합니다. 예를 들어 자동 주차, 환경 매핑, 도로의 교통 제어 시스템, 보행자를 인식하여 차량을 멈추고 달리지 않고 얼굴을 인식하고 일부 보안 시스템과 같은 데이터베이스에 등록 된 사람들의 데이터, 비디오 분석 등
이 머신 비전의 잠재력은 너무나 극단적이어서 정부 및 대기업 그들은 합법적이든 아니든 다양한 목적으로 그것을 사용합니다. 확실히 알고있는 몇 가지 실용적인 응용 분야는 다음과 같습니다.
- 페이스북: 소셜 네트워크에 업로드 된 사진에 이러한 유형의 인공 시력을 사용하면 복잡한 알고리즘을 사용하여 얼굴을 인식 할 수 있습니다. 이렇게하면 AI를 더 강력하게 만들고 향후 다른 애플리케이션을 위해 개선 할 수 있습니다.
- 플리커 (Flickr)-이 머신 비전을 사용하여이 플랫폼에서 이미지 저장소를 사용하여 3D 장면을 재구성 할 수 있습니다.
- 산업: 인공 비전 시스템으로 조립 라인의 결함을 감지하고 결함이있는 물체를 신속하게 폐기 할 수 있습니다. 예를 들어, 농업 부문에서 수집 된 과일이 컨베이어 벨트를 통해 이동할 때 인공 비전 센서를 통해 파손, 손상, 썩은 과일 또는 과일 이외의 물체를 감지하여 공기 분사로 제거 할 수 있습니다. 또는 다른 메커니즘.
- 비디오 감시: 많은 보호 센터에서 특정 차량이나 사람을 포착하고, 그들이 누구인지 알아 내고, 해당 정보를 시스템에 전송하거나 나중에 분석하기 위해 기록하는 데 사용할 수 있습니다. 많은 회사에서는 심지어 사람들이 어떻게 옷을 입는 지 (패션 부문), 특정 단체를 통해 누가 시위를했는지 알아 내고, 공공 장소 나 바쁜 센터에서 의심스러운 사람의 존재를 감지하는데도이를 사용합니다.
현재 비즈니스, 은행, 국세청 등을 감시하기위한 모든 종류의 감시 카메라가 거리 곳곳에 흩어져 있습니다. 우리 모두로부터 많은 정보가 수집됩니다....
필요한 재료
프로그래밍 할 수 있고 라이브러리를 사용하는 마이크로 컨트롤러가있는 Arduino 보드 외에도 당신은해야 할 것입니다 프로젝트의 다른 기본 요소도 있습니다. 그중에는 물론 이미지 처리가 가능한 카메라가 장착 된 모듈이 있습니다. 예를 들어 Pixy CMUCam 5 또는 비슷한. 이 모듈에는 직렬 포트 UART, SPI, I2C, 디지털 출력 또는 아날로그 신호를 통해 센서가 캡처 한 정보를 전송하도록 프로그래밍 할 수있는 강력한 프로세서가 있습니다.
Pixy CMUCam 5를 사용하면 초당 최대 50 프레임 (50FPS)을 처리 할 수 있습니다. 이러한 기능을 사용하면 캡처 한 모든 비디오를 지속적으로 녹화하는 대신 원하거나 검색 한 이미지 만 전송하도록 프로그래밍 할 수 있습니다. 보다 쉬운 취급을 위해 무료 및 오픈 소스 애플리케이션 전화 픽시몬 당신의 통제를 위해.
이 Pixy CMUcam5 카메라를 구입하기로 결정한 경우 6 핀에서 10 핀 IDC 케이블과 장착 하드웨어가 함께 제공됩니다. 게다가, 기술적 특성 모듈의 다음과 같습니다.
- NXP LPC4330Mhz 듀얼 코어 프로세서.
- 254Kb RAM 메모리,
- 140mA 소비.
- 9715 × 1 해상도의 Omnivision OV4 1280/800 인치 이미지 센서.
- 수평 75º 및 수직 47º 시야각.
- 물체를 찾기위한 간단한 이미지 인식.
- Arduino 보드 (특정 라이브러리 포함), Raspberry Pi, BeagleBone Black 및 기타 유사한 보드와 함께 사용할 수 있습니다.
- 통신 포트 : SPI, I2C, UART, USB 또는 아날로그 / 디지털 출력.
- Windows, macOS 및 GNU / Linux와 호환되는 PixyMon 소프트웨어.
- 작은 크기.
- 프로젝트 Wiki에서 사용할 수있는 문서입니다.
- Arduino 용 라이브러리가있는 Github 저장소.
- 펌웨어
- 자습서
그 외에도 다른 유형의 API, 라이브러리 및 기타 자료 이러한 카메라와 인공 시력의 도움으로 모든 종류의 프로젝트를 만들 수 있습니다. 예를 들어 다음 사항에 유의해야합니다.
- OpenCV: 인텔에서 처음 개발 한 무료 머신 비전 라이브러리입니다. 이제 BSD 라이선스로 출시되었으며 누구나 움직임 감지, 물체 인식, 로봇 시각, 얼굴 인식 등에 사용할 수 있습니다. 크로스 플랫폼이므로 GNU / Linux, macOS, Windows 및 Android에서 사용할 수 있습니다.
- 다음과 같은 기타 프로젝트 차량 감지.
Hwlibre에서 시작하는 것이 좋습니다. 이 분야에 대해 실험하고 배우십시오....
Pixy 2 CMUcam5를 Arduino와 통합하는 간단한 예

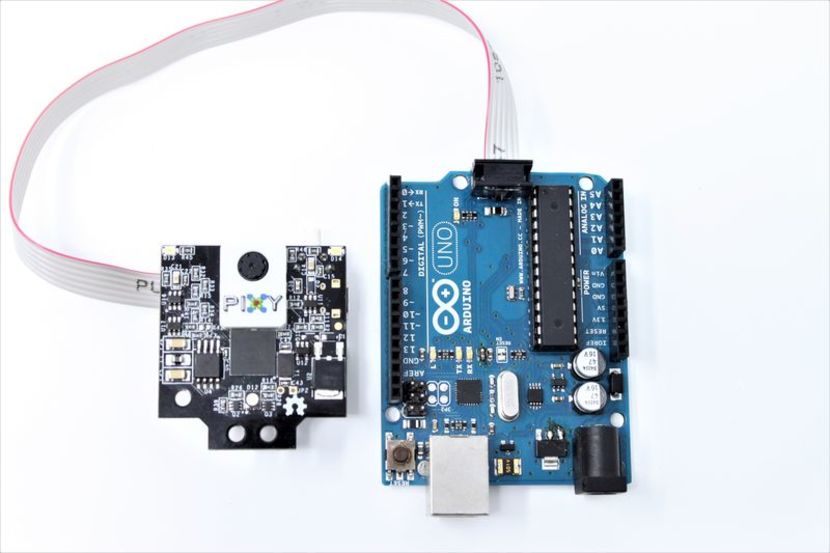
이것을 사용하려면 Arduino 보드가있는 Pixy 2 CMUcam5 모듈, 몇 가지 추가 요소를 사용해야합니다. 예를 들어 다음을 수행 할 수 있습니다. 서보 모터 사용 S06NF 또는 비슷한, 카메라가 프로그래밍 한 물체를 감지 할 때 작동합니다. 물론 위에서 말한 PixyMon 소프트웨어와 Arduino 용 GitHub 라이브러리를 다운로드해야합니다.
Arduino 프로그래밍에 대한 자세한 정보는 다음을 수행 할 수 있습니다. PDF 다운로드 무료 코스.
일단 당신이 PixyMon 설치 운영 체제에서 다음 단계를 따르십시오.
- Pixy를 USB 케이블로 연결 모듈의 RGB LED가 켜져 있는지 확인하면 제대로 작동하고 있음을 나타냅니다.
- PixyMon 앱을 엽니 다. 모든 것이 정확하면이 순간에 카메라가 캡처하는 것을 볼 수 있습니다.
- 하위 메뉴로 이동 행동 또는 행동을 클릭 한 다음 서명 설정 또는 서명 설정을 클릭합니다. 이제 비디오가 정지되고 카메라가 센서 앞에있는 한 감지 할 색상이나 물체를 선택할 수 있습니다. 예를 들어 공을 사용할 수 있습니다. 따라서 공이 센서 앞을 지나갈 때마다 감지됩니다.
- 보시다시피 최대 7 개 세트 서명, 카메라가 감지 할 수있는 최대 7 개의 서로 다른 물체를 구성 할 수 있습니다.
- 하나만 선택하면 다음 단계로 이동할 수 있습니다. 또는 목록에서 개체를 제거하려면 작업 또는 작업 메뉴로 이동 한 다음 모두 삭제 서명 또는 특정 서명 삭제를 선택합니다. 구성 또는 구성으로 이동 한 다음 수정하려는 특정 서명으로 이동하여 변경할 수도 있습니다.
이제 보드를 구성 할 수 있습니다. 아두 이노, 네가 원한다면. 이렇게하려면 Arduino 용 Pixy 라이브러리를 사용해야한다는 것을 이미 알고 있습니다. 이 라이브러리에는 코드를 처음부터 작성하지 않고도 실험을 시작할 수있는 간단한 예제도 포함됩니다. 간단히 열어서 이러한 스케치를 실행하거나 수정하여 작동 방식을 확인하면됩니다. 이 라이브러리를 사용하려면 다음 단계를 따르십시오.
- 방출 Arduino 용 라이브러리입니다.
- 열기 아두 이노 IDE.
- Sketch로 이동합니다. 라이브러리 포함 그런 다음 .zip 라이브러리를 추가하고 다운로드 한 라이브러리를 선택합니다.
- 이제 통합 될 것입니다. 몇 가지 예제 테스트 시작 카메라가 Arduino 보드에 올바르게 연결되어 있습니다. 이렇게하려면 예제 또는 예제 메뉴로 이동 한 다음 Pixy로 이동하여 그중 하나를 선택합니다. 나는 당신이 시작하는 것이 좋습니다 안녕하세요_월드.
- Arduino 보드가 연결된 상태에서 USB to PC, 스케치 업로드 보드에 연결 한 다음 도구, 직렬 모니터를 차례로 선택합니다.
- 이제 창에 정보가 표시되기 시작합니다.
물론 모든 전자 부품을 연결하는 것을 잊지 마십시오 카메라 자체를 포함하여 Arduino 보드가 필요합니다. 이미지에서 볼 수 있듯이 이러한 모듈로 향하는 Arduino ISCP 핀에 연결된다는 것을 이미 알고 있습니다.