
Mehatronika ir disciplīna, kas sajauc mehāniku ar elektroniku, būdama daudznozaru inženierzinātņu nozare, kas balstās uz robotiku, elektroniku, skaitļošanu, telekomunikācijām, vadību utt. Lai pārsniegtu elektroniskos DIY projektus un sāktu eksperimentēt ar mehatroniskiem projektiem, varat sākt integrēt tādas ierīces kā dzinējiem vai lineārs izpildmehānisms savam Arduino.
Tas tevi atver jauna iespēju pasaule veidotājiem. Faktiski šis lineārais izpildmehānisms ir vispraktiskākais ar spēju veikt mobilās darbības vai izdarīt spēku citiem elementiem. Vai vēlaties uzzināt vairāk? Mēs jums sakām ...
Lineāro izpildmehānismu veidi

Ir vairāki izpildmehānismu veidi, lai gan šajā rakstā mēs koncentrēsimies uz to, kas virzuļa darbināšanai izmanto elektromotoru. Bet jums jāzina, ka var būt arī citi veidi:
- Hidraulika: Virzuļa pārvietošanai viņi izmanto kāda veida šķidrumu. Piemērs var būt daudzu lauksaimniecības mašīnu vai ekskavatoru piemērs, izmantojot šos virzuļus un eļļas spiedienu, lai pārvietotu šarnīrsavienojumus, hidrauliskās preses utt.
- Elektriski: tie ir izpildmehānismi, kas kustības radīšanai izmanto bezgalīgu skrūvi, kuru pārvieto elektromotors. Ir arī elektromagnēts (elektromagnēts), kas izmanto magnētisko lauku, lai virzītu virzuli vai virzuli, un atsperi, lai atgrieztu to sākotnējā stāvoklī, kad šis lauks netiek izmantots. Praktisks piemērs var būt pēdējais piemērs, ko es izklāstu šajā rakstā, vai arī daudzi citi robotikas, parasto mehānisko ierīču utt.
- Riepas: kā šķidrumu viņi izmanto gaisu, nevis šķidrumu kā hidraulikas gadījumā. To piemērs ir tipiski lineārie izpildmehānismi, kas atrodami dažu izglītības centru tehnoloģiju darbnīcās.
Šīs ierīces galvenais mērķis ir pārveidot enerģiju hidrauliskais, elektriskais vai pneimatiskais šajā gadījumā lineārā vilcē, tādējādi izdarot spēku, vilci, darbojoties kā regulators, aktivizējot kādu citu mehānismu utt.
Par elektronisko lineāro izpildmehānismu
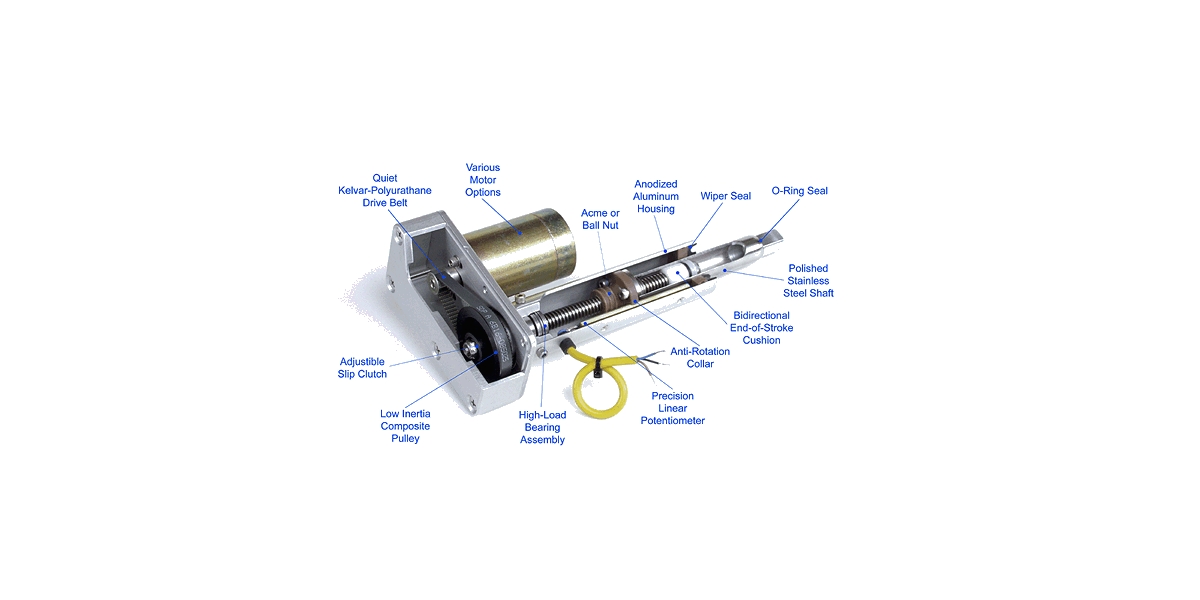
Būtībā a elektriskais lineārais izpildmehānisms dažreiz tas nav nekas cits kā elektromotors var būt NEMA kā jau redzēts. Šis motors pagriež vārpstu, un ar zobratu vai zobu ķēžu kombināciju tas pagriezīs bezgalīgu skrūvi. Šī bezgalīgā skrūve būs atbildīga par virzuļa vai stieņa bīdīšanu vienā vai otrā virzienā (atkarībā no rotācijas virziena).
Tas virzulis tas būs tas, kas kalpo kā izpildmehānisms, lai kaut ko stumtu, kaut ko vilktu, izdarītu spēku utt. Pieteikumi ir diezgan plaši. Kā redzat, tas ir kaut kas pavisam vienkāršs, kas nesatur pārāk daudz noslēpumu.
Šiem lineārajiem izpildmehānismiem, atšķirībā no citiem nelineāriem, ir priekšrocība, ka tie spēj darboties lieli spēki un pārvietojumi ievērojams (atkarībā no modeļa). Bet Arduino jums ir daži modeļi, kas var būt no 20 līdz 150 Kgf (spēks kilogramā vai kiloponds), un pārvietojumi no 100 līdz 180 mm.
Tā kā liels trūkums ir tā pārvietošanās ātrumsJo, iedarbinot šos milzīgos spēkus, samazināšanas riteņi, kas nepieciešami griezes momenta palielināšanai, novedīs pie pagarināšanas un ievilkšanās ātruma. Tipiskiem modeļiem var piešķirt ātrumu no 4 līdz 20 mm / s. Tas nozīmē, ka, lai pabeigtu visu lineāro procesu, tas var ilgt no dažiem desmitiem sekundes līdz dažām minūtēm, ja tas ir garāks un lēnāks ...
Kas attiecas uz viņu barošana, jums ir dažādi spriegumi vai spriegumi. Piemēram, parasti ir tas, ka tie ir 12 vai 24v, lai gan dažus var atrast zem un virs tā. Attiecībā uz patēriņu dažos gadījumos tie var svārstīties no 2A līdz 5A. Kā redzat, būdams jaudīgs motors, patēriņš ir liels ... Tātad, ja plānojat to barot ar baterijām, jums jāņem vērā, ka viņiem ir nepieciešamā jauda.
Lineārā izpildmehānisma vadība
Elektriskajam lineārajam izpildmehānismam, kuru varat atrast Arduino, varētu būt dažādi veidi kontrole:
- Ar potenciometru: ar potenciometru tie ļauj izvēlēties virzuļa stāvokli.
- Ar karjeras beigām: gala slēdzis katrā galā liks tam apstāties pašam, tiklīdz tas sasniegs augšu.
- Nekontrolējams: viņiem nav nevienas no iepriekšminētajām vadības sistēmām.
Piepildījums
El pinout lineārās izpildmehānisms nevar būt vienkāršāks. Tam ir divi vadoši kabeļi, lai ievadītu elektromotoru, ko tas integrē, un nekas cits. Tāpēc nulle komplikāciju. Vienīgais, kas jāpatur prātā, lai pagarinātu vai ievilktu kātu, ir tas, ka motora rotācija ir jāmaina pretējā virzienā (pašreizējā polaritāte).
Lai tas būtu iespējams, jūs varat izmantojiet H-tilta kontrolieri kā tas, ko izmanto līdzstrāvas motoriem. Jūs varētu domāt, ka tāds kā viņš jums kalpo L298N, u pārējie redzams, piemēram, TB6612FNG utt. Bet patiesība ir tāda, ka nevienam no viņiem nav pietiekami daudz jaudas šiem lineārajiem izpildmehānismiem (ja tie ir lieli). Tāpēc kontrolieris izdegtu.
Tādēļ jūs varat tikai būvēt savu ātruma kontroli izmantojot tranzistorus, piemēram, BJT vai MOSFET, un pat releji cietvielu ...
Kur nopirkt lineāro izpildmehānismu?
El cena lineārā izpildmehānisma lielums būs atkarīgs no izmēra, ātruma, garuma un arī no spēka, ko tas var izturēt. Parasti tos var atrast no aptuveni 20 līdz 200 eiro. Un jūs tos viegli atradīsit specializētos elektronikas veikalos vai citos tiešsaistes veikalos, piemēram, Amazon. Piemēram:
- Sourcingmap solenoīda izpildmehānisms, kas spēj iedarbināt 400g un 4mm spēku
- Justech DC 12V lineārais izpildmehānisms līdz 72kg un 150mm gājiens
- LHQ-HQ DC 12v ar ietilpību 80 kg un 50 mm braucienam
- Pie jūras 12 V līdz 300 mm un 150 kg atbalstītā svara (lēsts, ka 50 mm)
- Netika atrasts neviens produkts.
Daudzi no šiem produktiem ir aizsargāti putekļi un šļakatas ar IPX54 sertifikātu. Paturiet prātā ražotāja ieteikumus, norādītie svari ne vienmēr tiek atbalstīti visiem pagarinājumu garumiem, dažos gadījumos līdz noteiktam pagarinājumam tiek atbalstīts tikai noteikts robežsvars.
Integrācija ar Arduino
Šāda veida izpildmehānismiem var būt dažādas praktiskas izmantošanas iespējas, ja jūs tos integrējat savā Arduino dēlī. Lai to izdarītu, pirmā lieta, kas jums jāzina, ir veids, kā jūs varat izveidojiet savienojuma shēmu ar savu žetonu. Kā redzat, tas vispār nav sarežģīts, tāpēc tas nerada pārāk daudz sarežģījumu.
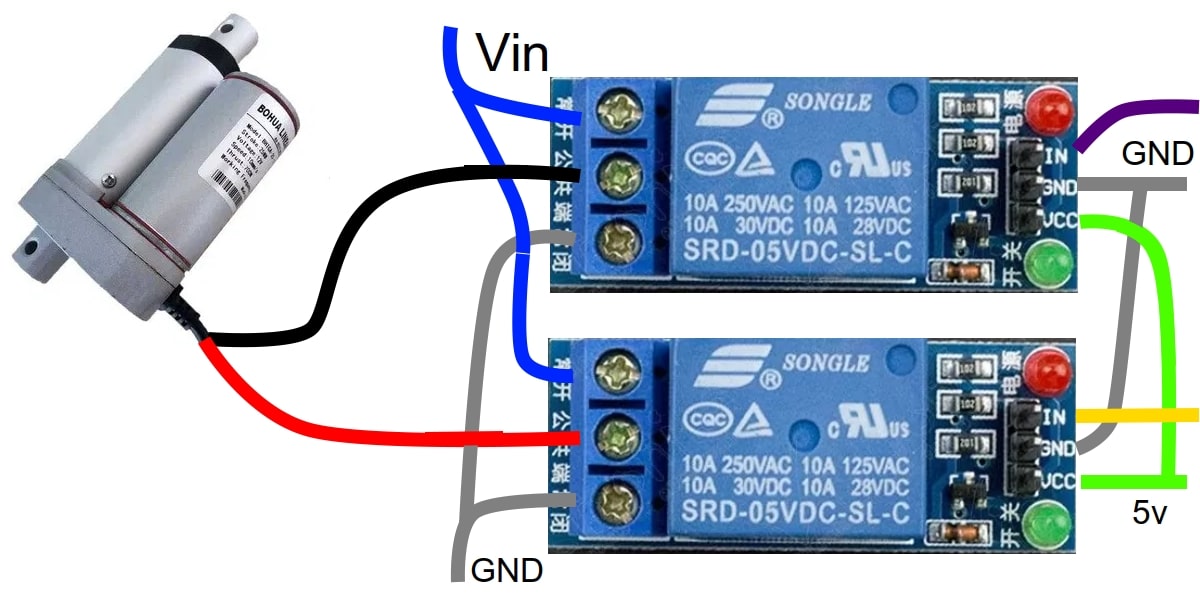
Kā redzams no iepriekš zīmētās shēmas, kuru esmu zīmējis, esmu izmantojis divus relejus un lineāru izpildmehānismu. The krāsainas līnijas jūs uzskatāt, ka tas pārstāv sekojošo:
- Sarkana un melna: ir lineārā izpildmehānisma kabeļi, kas nonāks pie katra izmantotā releja.
- Pelēks: kā redzat, katrā relejā esat pieslēdzies zemei vai GND.
- Azul: tas nonāk strāvas padevē Vin relejam, šajā gadījumā tas būs no 5v līdz 12v.
- Zaļš: moduļa Vcc līnijas ir savienotas ar jūsu Arduino dēļa 5v.
- Pelēks: arī iezemēts, savienots no moduļa ar Arduino GND.
- Violets un oranžs: ir vadības līnijas, kas iet uz jebkuru no Arduino tapām, lai kontrolētu griešanos. Piemēram, jūs varat doties uz D8 un D9.
Kas attiecas uz jūsu Arduino IDE avota kods, pamata vadības skice būtu šāda:
//configurar las salidas digitales
const int rele1 = 8;
const int rele2 = 9;
void setup()
{
pinMode(rele1, OUTPUT);
pinMode(rele2, OUTPUT);
//Poner los relés a bajo
digitalWrite(rele1, LOW);
digitalWrite(rele2, LOW);
}
void loop()
{
extendActuator();
delay(2000);
retractActuator();
delay(2000);
stopActuator();
delay(2000);
}
//Activar uno de los relés para extender el actuador
void extendActuator()
{
digitalWrite(rele2, LOW);
delay(250);
digitalWrite(rele1, HIGH);
}
//Lo inverso a lo anterior para retraer el émbolo
void retractActuator()
{
digitalWrite(rele1, LOW);
delay(250);
digitalWrite(rele2, HIGH);
}
//Poner ambos releś apagados parar el actuador
void stopActuator()
{
digitalWrite(rele1, LOW);
digitalWrite(rele2, LOW);
}
Tu modificēt kodu lai varētu kontrolēt un novietot virzuli noteiktās pozīcijās, ja vēlaties, vai pievienot vairāk elementu ...