
有几种类型的 电动机如 步进电机或步进电机,而 伺服马达. 在后者中有一些非常有趣的模型,例如 伺服SG90案例. 适用于第一个项目、使用此类设备的实践、学习、简单的机器人控制等的伺服系统。 此外,它的功率要求非常低,甚至可以从一个 阿德里安板 或从 PC USB 端口到 5v。
什么是微伺服SG90?

SG90 舵机是一个微型舵机,有一些 非常紧凑的尺寸 能够集成到空间很重要的项目中。 此外,它经济且易于使用,对能源的需求非常低,因此也可以在嵌入式、物联网或其他低功耗应用中使用。
至于 Servo SG90,该伺服电机包括一个 通用 S 型连接器 这将能够适应大多数商业设备。 它由 3 根电线组成,其颜色标识每根电线的用途:
- 罗霍:是电源线正极还是Vcc(+)
- 褐色:是电源线负极(-)还是GND(地)
- 橙:是传送PPM(Pulse Position Modulation)信号来控制伺服电机的电缆
某些型号还可能具有颜色组合 黑红白, 在这种情况下,这种情况下的方案将分别是 GND-Vcc-PPM 信号。
SG90 伺服特性
恩CUANTO一个 技术特点 在该伺服电机中,Servo SG90 具有以下特点:
- 支撑重量: 1.2 到 1.6 Kg (足够它的小尺寸)
- 4.8v 时的电机扭矩: 1.2公斤/厘米
- 工作电压: 4 – 7.2 伏
- 转速为 4.8v: 0.12s/60º
- 旋转:120º
- 功能温度范围: -30ºC 和 +60ºC
- 尺寸:22×11.5×27毫米
- 重量:9 g 或 10.6 g,包括电缆和连接器
- 与 Arduino 兼容:是的
- 通用连接器:与大多数无线电控制接收器兼容(Futaba、JR、GWS、Cirrus、Hitec...)
您还会发现 Servo SG90 的一些变体,例如:
- 名爵90S:与SG90类似,但有金属齿轮和连杆,因此可以支撑1.8kg。
- MG996R:它的尺寸稍大一些,但在 15V 下可支持 6 Kg,在 13v 下可支持 4.8 Kg。
更多信息 - 下载数据表
哪里能买到这么便宜的伺服电机型号
如果您想购买这种类型的 Servo SG90 伺服电机,您可以在一些专门的电子商店或亚马逊平台上找到它们。 例如, 这些推荐产品:



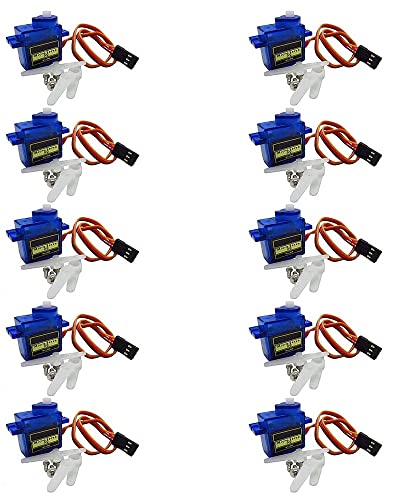


如您所见, 他们很便宜,您可以将它们散装或成包购买,用于需要多个机器人的机器人和其他项目。 此外,有些包装还包括某些附加配件,例如刀片、螺丝等。
恩CUANTO一个 变种 上面提到的,你有这些:
现在,如果您正在寻找的是 更强大、更坚固的伺服电机,能够承受更大的负载和更大的扭矩,那么您还有其他紧凑但性能更高的产品:
- 带金属齿轮的 Quimat 伺服系统可承受高达 20 公斤的重量
- Servo Innovateking 能够在其轴上支撑高达 35 Kg 的负载
- ANNIMOS 伺服带不锈钢齿轮,最大承重 60 Kg
- 没有找到产品。
如何与 Arduino 一起使用
举一个 Arduino IDE 的草图示例,以便您开始了解 SG90 伺服系统的工作原理,这里有一个实际案例。 但首先,让我们看看你应该如何 将伺服器连接到您的 Arduino 板:
- VCC:它必须连接到外部电源或 Arduino 的 5V 连接器。 如果您要使用多个电源,请记住始终将接地或 GND 放在一起以避免出现问题。
- GND:您可以将其连接到 Arduino 板的 GND。
- PPM 信号:可以连接到 Arduino 上的任何 PWM 引脚。 例如,到我们草图中的 D11。
看 示例源代码,您可以随意尝试和修改,您有两个自己的示例,您可以在 IDE 中看到 Servo.h 库,就像另一个:
#include <Servo.h>
Servo myservo; //Crear el objeto servo
int pos = 0; //Posición inicial del servo SG90
void setup() {
myservo.attach(11); //Vincular el pin 11 de Arduino al control del Servo SG90
}
void loop() {
//Cambia la posición de 0º a 180º, en intervalos de 25ms
for (pos = 0; pos <= 180; pos += 1)
{
myservo.write(pos);
delay(25);
}
//Vuelve desde 180º a 0º, con esperas de 25ms
for (pos = 180; pos >= 0; pos -= 1)
{
myservo.write(pos);
delay(25);
}
}
更多信息 - 下载 Arduino 编程手册