La combinación de fusión de sensores y vehículos definidos por software (VDS/SDV) está revolucionando cómo se diseñan, actualizan y conducen los coches. Hablamos de una evolución donde el software manda, orquesta múltiples sensores y actuadores, y permite mejorar prestaciones sin tocar el hardware.
Este enfoque, cada vez más presente en el sector, integra cámaras, radares, LiDAR y sensores inerciales para comprender el entorno en tiempo real, mientras que una arquitectura centralizada y conectada habilita actualizaciones OTA, servicios remotos, nuevos modelos de negocio y sistemas avanzados de asistencia (ADAS) e incluso funciones de conducción automatizada.
Qué es un Vehículo Definido por Software
Un VDS es un vehículo cuya funcionalidad está definida y gobernada por el software. A diferencia de los coches tradicionales, donde cada sistema electrónico y mecánico funciona de forma rígida y aislada, los SDV coordinan todas las funciones mediante plataformas de cómputo potentes, comunicaciones internas y externas, y una capa de aplicaciones que evoluciona con el tiempo.
Este concepto no surge de cero; su impulso viene del salto en sensores, actuadores, hardware de alto rendimiento y algoritmos (incluida la IA y la ingeniería de control) que ya permiten interrelaciones profundas entre tracción, frenado, dirección, percepción, navegación y experiencia de usuario.
Diferencias frente a los vehículos tradicionales
En un coche convencional, la mayoría de funciones dependen de hardware específico y poco flexible. En un VDS, el núcleo es el software, que aumenta la interrelación entre subsistemas y simplifica la evolución de funcionalidades a lo largo del ciclo de vida del vehículo.
Las mejoras ya no requieren sustituir piezas: se entregan por actualizaciones remotas rápidas, reduciendo costes y tiempos, aunque implican retos de seguridad funcional y ciberseguridad. Esta capacidad de actualización continua permite incorporar tecnologías punteras y mejoras de seguridad con agilidad.
Además, los SDV pueden recopilar datos en tiempo real para optimizar rendimiento, nutrir futuras versiones y acelerar la innovación en nuevas funciones y servicios.
Arquitectura SDV
La base física la forman procesadores de alto rendimiento, redes internas, almacenamiento, múltiples sensores y actuadores distribuidos. Esta plataforma de hardware robusto ejecuta software en tiempo real, conecta componentes y sincroniza órdenes hacia frenos, dirección o propulsión.
Sobre esa base, el software se organiza en capas: un sistema operativo gestiona ciberseguridad, memoria y E/S; una capa de virtualización o middleware intermedia y estandariza comunicaciones; y una capa de aplicación implementa funciones (tracción, frenado, dirección, etc.) sin depender de detalles del hardware subyacente.
La arquitectura se completa con conectividad hacia el exterior: Internet, 5G, V2X y nube para servicios remotos, diagnóstico, analítica y despliegue de actualizaciones OTA en vehículos y flotas.
Plataformas de desarrollo y ecosistemas
La estandarización y la colaboración son claves. AUTOSAR, en sus perfiles Classic (tiempo real, seguridad y alta confiabilidad) y Adaptive (entornos dinámicos, actualizaciones OTA y conectividad), se ha convertido en piedra angular de la interoperabilidad en automoción.
También ganan espacio herramientas y sistemas con enfoques específicos: el lenguaje Rust por su seguridad y eficiencia en memoria; y RTOS como FreeRTOS (código abierto, dispositivos con recursos limitados) y SAFERTOS (certificado para seguridad funcional), idóneos para componentes críticos.
Los proveedores de silicio y software ofrecen entornos estables para SDV con procesadores escalables que facilitan reutilización de código, controladores de calidad de producción y MCAL orientado a seguridad. Además, brindan opciones de SO como FreeRTOS, Linux, QNX y SafeRTOS, y compatibilidad con AUTOSAR para simplificar la integración con un ecosistema diverso.
Historia y evolución
Desde los años 70, los primeros sistemas electrónicos controlaban motor y emisiones. En los 90, los microprocesadores habilitaron el control de tracción y ABS, y con el nuevo milenio llegó la conectividad, la digitalización y los ADAS, elevando seguridad y confort.
Hoy, las funciones avanzadas de asistencia y automatización combinan sensores, cámaras y algoritmos de procesamiento en tiempo real, acercando cada vez más a los distintos niveles de conducción autónoma con una visión integral del vehículo como sistema.
Fusión de sensores en los SDV
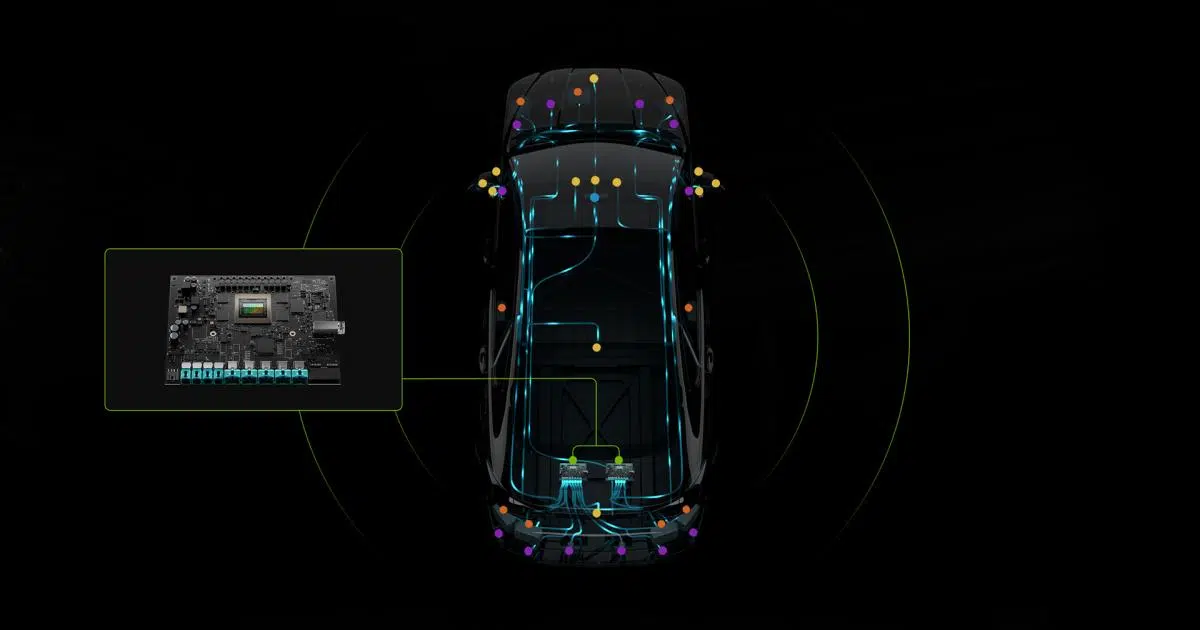
La fusión de sensores integra datos de múltiples fuentes para ofrecer una visión más precisa, robusta y útil del entorno y del propio vehículo. Permite superar las limitaciones de un sensor aislado combinando señales visuales, de distancia y movimiento con modelos matemáticos y de IA.
Sus piezas esenciales incluyen: la captura mediante cámaras, LiDAR, radar, ultrasónicos y sensores inerciales; el preprocesado (limpieza, sincronización y normalización); los algoritmos de fusión que unifican las señales; y una etapa de toma de decisiones que alimenta control y planificación.
Cómo funciona
Primero se recogen datos heterogéneos, después se sincronizan y filtran para reducir ruido y sesgos, y a continuación se combinan con técnicas que devuelven un estado coherente del entorno. Esta representación se interpreta para accionar funciones como detección de obstáculos, seguimiento de objetos o maniobras.
Entre las técnicas más extendidas están el filtrado de Kalman para estimar estados con ruido, los enfoques bayesianos para actualizar probabilidades con nuevas evidencias y la fusión basada en aprendizaje profundo, donde redes neuronales aprenden a combinar señales multimodales.
Retos técnicos
La sincronización temporal entre sensores con distintas frecuencias y marcas de tiempo exige estrategias robustas de alineamiento y sellado temporal.
El ruido e incertidumbre son inevitables: se necesitan filtros, modelos probabilísticos y calibraciones frecuentes para mantener la calidad de datos.
La complejidad computacional es alta, especialmente en tiempo real; la computación en el borde (edge) y la aceleración hardware ayudan a contener latencias.
Diseñar la complementariedad para evitar redundancias conflictivas y resolver discrepancias entre sensores es un desafío clave de arquitectura.
Aplicaciones
En vehículos autónomos y ADAS, la fusión soporta la navegación, la percepción 360° y la planificación de trayectorias. En robótica, facilita manipulación y ubicación; en ciudades inteligentes, integra señales IoT para movilidad y energía; en salud, los dispositivos vestibles combinan múltiples métricas; y en industria, impulsa mantenimiento predictivo y control de calidad.
Beneficios y conectividad
La seguridad se ve reforzada por los ADAS, que reducen riesgos mediante percepción avanzada y control distribuido. Estas funciones ejecutan respuestas coordinadas en frenado, dirección y aceleración con tiempos de reacción imposibles para un humano.
- Control de crucero adaptativo: ajusta la velocidad para mantener la distancia.
- Asistencia de aparcamiento: ayuda en maniobras con sensores y cámaras.
- Frenado automático de emergencia: actúa ante riesgo de colisión.
- Mantenimiento/cambio de carril: evita desviaciones y apoya la maniobra.
- Detección de ángulo muerto: alerta sobre zonas no visibles.
En eficiencia operativa, los SDV permiten optimización continua a partir de datos del vehículo y del entorno, con monitorización remota, diagnósticos predictivos y menos paradas en taller.
En personalización, los usuarios activan funciones a demanda y reciben mejoras por OTA; eso sí, con diseño cuidadoso para cumplir las restricciones de seguridad y evitar riesgos en la actualización.
La conectividad avanzada habilita servicios como navegación en tiempo real, gestión de flotas, entretenimiento y V2X, transformando la experiencia a bordo y la relación entre vehículo, infraestructura y nube.
Panorama de mercado y modelos de negocio
La transición hacia cómputo centralizado y arquitecturas cuasi zonales está disparando el valor. Se estima que estas plataformas generarán alrededor de 755.000 millones de dólares en ingresos por hardware para 2029, mientras que las funciones SDV crecerán a una tasa del 30–34% anual hasta 2035 gracias a la monetización de servicios conectados y de autonomía.
Los SDV se pueden clasificar en cinco niveles, desde diseños centrados en pasarelas y dominios hasta vehículos totalmente software‑céntricos. En el centro aparecen los HPC, controladores zonales y middleware orientado a servicios, habilitando separación hardware‑software y escalado funcional.
El negocio se reconfigura con características como servicio, comercio en el vehículo y una cabina digital donde la IA en el dispositivo (con actores como Qualcomm, Nvidia o Unity) habilita experiencias adaptativas: pantallas de ancho completo, avatares de IA y “skins” personalizables.
La conectividad V2X (C‑V2X, DSRC y 5G) es clave para seguridad y coordinación; su adopción depende de espectro y políticas por región (China, UE, EE. UU., Japón, Corea). La integración de OBU, RSU y chipsets se alinea con las plataformas SDV para acelerar despliegues.
Desafíos más allá de lo técnico
Modelos de pago por suscripción pueden generar rechazo del consumidor si se aplican a funciones percibidas como estándar, afectando a la percepción de marca.
La mayor conectividad trae riesgos de ciberseguridad sobre control del vehículo, privacidad y servicios en la nube; se requieren marcos avanzados y vigilancia continua.
La propiedad y protección de datos exige políticas claras de almacenamiento, uso y compartición, así como consentimiento y cumplimiento normativo.
El desarrollo, validación y mantenimiento de plataformas SDV implica altos costes, sobre todo en funciones críticas y en infraestructura para actualizaciones OTA seguras.
La complejidad se desplaza a millones de líneas de código, múltiples capas y proveedores, elevando el riesgo de errores de integración y fallos.
Existe escasez de talento en software, IA y ciberseguridad dentro de fabricantes con cultura mecánica fuerte; muchos no esperan completar capacidades internas antes de la próxima década.
Surgen retos regulatorios sobre responsabilidad, actualización de comportamiento por software y seguridad en evolución, especialmente con funciones automatizadas.
La IA plantea dudas sobre explicabilidad y previsibilidad, así como la gestión de anulaciones o edge cases en conducción automatizada.
La fragmentación de plataformas, sistemas operativos y nubes complica compatibilidad y escalabilidad entre modelos y regiones.
Aunque las OTA son prácticas, una mala gestión de actualizaciones puede desencadenar fallos de sistema y frustración de usuarios; gobernanza y pruebas son imprescindibles.
Alianzas y hojas de ruta industriales
Bosch y Cariad están fortaleciendo su cooperación en funciones de conducción asistida y automatizada de niveles 2 y 3 con un paquete de software basado en IA. Desarrollan de forma independiente todos los componentes, buscando comportamientos tan naturales como los de un conductor humano y una seguridad superior.
Las primeras funciones ya ruedan en flotas de prueba y se entrenan con grandes volúmenes de datos. El objetivo es disponer de un paquete aplicable a producción a partir de mediados de 2026, integrable en la nueva arquitectura SDV del Grupo Volkswagen y escalable para otros fabricantes.
La IA se aplica a lo largo de toda la cadena: percepción, fusión de cámaras y radares, toma de decisiones y control seguro de tren motriz, dirección y frenos. Con visión de futuro, se exploran enfoques multimodales tipo Vision‑Language‑Action para razonar sobre escenarios complejos y detectar riesgos ocultos.
El control total del código fuente y la propiedad intelectual permiten imponer altos estándares de protección de datos, seguridad y transparencia, con decisiones de IA trazables y explicables. La ingeniería se apoya en una estrategia de hardware escalable para todas las gamas.
Las pruebas se realizan en vías públicas de Europa, Japón y EE. UU., con vehículos como ID.Buzz y Audi Q8. Este año se suman cientos de vehículos equipados con conjuntos completos de sensores para capturar casos límite; el desarrollo es data‑driven, con mejoras diarias.
Recursos y lecturas
Para profundizar en controladores centrales que habilitan SDV, es útil revisar el documento técnico de Aptiv. Acceso directo: Download PDF, donde se describe cómo una arquitectura centralizada potencia la computación de alto rendimiento, la zonificación y la actualización continua.
Obras y fuentes de referencia sobre fusión de sensores y estimación: Durrant‑Whyte y Bailey (SLAM), Thrun/Burgard/Fox (robótica probabilística), Bar‑Shalom et al. (seguimiento y navegación); además de recursos divulgativos de NVIDIA sobre sensor fusion para autónomos y de Intel en edge computing aplicados a esta temática.
Mirando todo el cuadro, la unión de SDV y fusión de sensores habilita un salto en seguridad, eficiencia y experiencia: una plataforma viva que aprende con datos, se actualiza sin cambiar hardware y abre modelos de negocio conectados, siempre que se gobierne con rigor la ciberseguridad, la calidad del software y la confianza en la IA.