La llegada de los vehículos autónomos no va solo de poner un coche a circular sin conductor, va de conseguir un posicionamiento en tiempo real extremadamente preciso, fiable y continuo, incluso en los entornos más complicados. Sin eso, cualquier sistema de conducción automatizada se queda cojo, por muy buena que sea su inteligencia artificial o su conjunto de sensores.
En este contexto entran en juego tecnologías como el GNSS avanzado, los sistemas inerciales INS, las altas tasas de actualización de los receptores y la comunicación con la infraestructura vial. Todo ello se combina con mapas 3D de alta definición, redes de corrección en tiempo real y plataformas conectadas como la DGT 3.0 para lograr que un vehículo sepa no solo dónde está, sino también qué ocurre a su alrededor y cómo debe reaccionar en cuestión de milisegundos.
Panorama actual de la autonomía y la necesidad de posicionamiento milimétrico
La industria del automóvil está metida de lleno en una transformación brutal, con un mercado de vehículos autónomos valorado en cientos de miles de millones de dólares a medio plazo y más de 500 compañías en todo el mundo desarrollando soluciones, como Waymo impulsa su tecnología para robotaxis.
Hoy la mayoría de vehículos con funciones avanzadas se sitúan en el nivel 2 de automatización (L2) según la SAE, es decir, sistemas ADAS capaces de mantener el carril, ajustar la velocidad o seguir al vehículo precedente, pero que exigen que el conductor supervise constantemente. El salto al nivel 3 (automatización condicional) ya está en marcha: empiezan a aparecer modelos de gama alta donde, en determinadas condiciones, el coche gestiona casi todo y el conductor actúa como respaldo, y empresas como Uber llevará sus robotaxis a algunas ciudades.
Para que estos sistemas de nivel 2, 3 y superiores funcionen de forma segura no basta con ver la carretera; hace falta una localización en tiempo real extremadamente precisa, estable y de baja latencia. A altas velocidades, un error de un solo metro o una actualización lenta de la posición pueden ser la diferencia entre una maniobra correcta y una situación peligrosa, sobre todo en autopistas, puentes, pasos elevados o entornos urbanos complejos.
Los marcos legales también avanzan. En regiones como Norteamérica, Europa y gran parte de Asia se están adaptando las normativas para admitir sistemas de conducción automatizada, pruebas de robotaxis y vehículos conectados. Todo ello viene acompañado de requisitos muy estrictos sobre ciberseguridad, robustez de los sensores y, por supuesto, precisión de posicionamiento.

Ecosistema de sensores: cómo “ve” y “se sitúa” un vehículo autónomo
Un vehículo autónomo moderno es básicamente una plataforma móvil cargada de sensores que generan una cantidad ingente de datos en tiempo real. Un turismo conectado actual puede llegar a producir unos 25 GB por hora, y en vehículos totalmente autónomos estas cifras se disparan. Ese flujo constante de información permite “ver”, “oír” y “sentir” el entorno con una riqueza de detalle imposible para un conductor humano, y se procesa con hardware especializado como NVIDIA Jetson T5000.
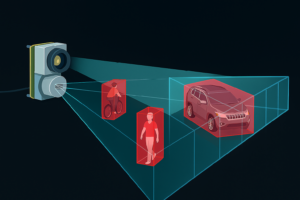
En la parte de percepción del entorno, el vehículo combina distintos tipos de sensores de conocimiento de la situación, una fusión de sensores en vehículos definidos por software:
- Cámaras RGB: proporcionan información visual de alta resolución, útil para reconocer señales, semáforos, peatones, marcas viales y objetos diversos.
- LiDAR: genera nubes de puntos 3D muy precisas que permiten reconstruir el entorno con gran exactitud geométrica, ideal para mapas de alta definición y detección de obstáculos.
- Radar de ondas milimétricas: resulta clave para medir distancias y velocidades relativas incluso bajo lluvia intensa, niebla o baja visibilidad, gracias a que las ondas de radio atraviesan condiciones donde la cámara o el LiDAR sufren.
- Ultrasónicos: se usan sobre todo a baja velocidad, en aparcamiento o maniobras muy cercanas, para detectar bordillos, otros vehículos o elementos a muy corta distancia.
Además de percibir, el vehículo tiene que saber con exactitud dónde está y hacia dónde se mueve. Aquí entran los sistemas de posicionamiento y navegación GNSS/INS, que proporcionan posición, velocidad y orientación (rumbo, balanceo y cabeceo) tanto en espacios abiertos como en entornos donde las señales satelitales son deficientes.
Sin una columna vertebral de posicionamiento fiable, el resto del ecosistema se tambalea. El sistema de navegación es el que permite al vehículo determinar en qué carril circula, cómo debe trazar una curva, cuándo cambiar de carril, qué ruta seguir y cómo sincronizarse con otros vehículos y con la infraestructura conectada.
Del GPS tradicional al GNSS de alta precisión para autonomía
El GPS revolucionó la automoción desde que en los años 80 y 90 empezó a democratizarse para el uso civil y comercial. Pasó de ser un sistema militar a convertirse en el copiloto imprescindible para llegar a cualquier sitio, optimizar rutas, ahorrar combustible y, en general, hacer la vida más fácil a conductores y flotas.
Sin embargo, el GPS “de toda la vida” no está pensado para los requisitos extremos de la conducción autónoma. Un receptor convencional suele ofrecer actualizaciones de posición a 1 Hz, es decir, una vez por segundo. A 100 km/h el vehículo recorre casi 28 metros entre dos posiciones consecutivas; a 300 km/h, más de 80 metros. Eso puede valer para navegación básica, pero no para maniobras rápidas, validación de sistemas autónomos o análisis fino de la dinámica del vehículo.
Por eso han surgido receptores específicos, como los sensores GPS CAN de 50 Hz usados en automoción y pruebas de vehículos autónomos. Estos dispositivos actualizan la posición, la velocidad y la referencia temporal 50 veces por segundo, es decir, cada 20 milisegundos, captando con mucho más detalle cómo se mueve un coche durante un frenazo, un cambio de carril evasivo o una curva tomada al límite.
La diferencia entre trabajar a 1 Hz y hacerlo a 50 Hz se parece a comparar una fotografía estática con un vídeo fluido. Con una foto ves dónde estaba el vehículo en un instante; con un vídeo ves cómo llega, cómo frena, cómo gira y cómo sale de la curva. Para calibrar algoritmos de control, reconstruir trayectorias o sincronizar eventos críticos subsegundo, la resolución temporal alta ya no es un extra, es imprescindible.
Navegación GNSS/INS estrechamente acoplada: la base de la fiabilidad
La autonomía no puede depender únicamente de las señales de satélite. En zonas urbanas densas, túneles, cañones urbanos, pasos elevados o cerca de edificios altos, el GNSS sufre pérdidas de señal, multitrayectoria y degradación de la calidad. Si el vehículo “desaparece” del mapa cada vez que entra en un túnel, el sistema se vuelve inusable.
La solución pasa por integrar de forma muy estrecha el GNSS con un sistema de navegación inercial (INS). El INS combina acelerómetros y giróscopos para estimar posición, velocidad y actitud a partir de un punto de partida conocido. Por sí solo, el INS sufre deriva con el tiempo, pero ofrece continuidad cuando no hay satélites. El GNSS, por su parte, es estable en el largo plazo, pero puede tener cortes temporales.
En una arquitectura de acoplamiento estrecho GNSS+INS, los datos de ambos sensores se fusionan a nivel de medida bruta mediante un filtro de Kalman u otros algoritmos de fusión. Esto implica que el sistema puede seguir calculando una solución de navegación incluso cuando solo hay unos pocos satélites visibles, o cuando la señal está parcialmente degradada, aprovechando al máximo toda la información disponible.
Los beneficios son claros: el INS rellena las lagunas cuando el GNSS se corta, mientras que el GNSS corrige de manera continua la deriva inercial. El resultado es una trayectoria mucho más suave, precisa y robusta que con un sistema “flojo” en el que cada bloque trabaja por su cuenta y se combinan solo las salidas finales.
Fabricantes especializados como CHCNAV han desarrollado sensores GNSS+INS específicos para autonomía, como la serie CGI-610 y CGI-830, que integran GNSS multiconstelación, algoritmos de fusión avanzados, soporte RTK y capacidades de navegación inercial mejoradas. Sus especificaciones buscan precisamente ofrecer precisión centimétrica cuando hay correcciones disponibles y mantener errores muy contenidos cuando la señal GNSS se degrada.
Requisitos de precisión y robustez en entornos reales
Los vehículos autónomos exigen una precisión de posicionamiento submétrica o incluso centimétrica para saber con certeza en qué carril circulan, cómo deben colocarse en una intersección compleja o cuándo han de ejecutar un adelantamiento. No es lo mismo “estar en la autopista A-1” que “estar en el carril 3, a 1,5 metros de la línea de separación con el carril 2”.
En entornos urbanos llenos de rascacielos, el problema se complica. Los edificios bloquean parte de la constelación de satélites y generan reflejos multipath que engañan al receptor, provocando saltos bruscos de posición. Para mitigar esto, los receptores para autonomía aprovechan todas las constelaciones disponibles (GPS, GLONASS, Galileo, BeiDou, etc.) y utilizan correcciones en tiempo real (RTK o PPP) para reducir errores.
Otro punto crítico es la resistencia mecánica y ambiental. Los receptores y antenas deben soportar vibraciones constantes, cambios bruscos de temperatura, humedad y polvo sin degradar su rendimiento. Un fallo de hardware no es solo un problema de mantenimiento: en un sistema autónomo puede convertirse en un riesgo directo para la seguridad.
Las pruebas de campo en condiciones reales son esenciales para validar estos sistemas. Por ejemplo, en campañas realizadas en entornos urbanos complejos de Japón con sensores GNSS/INS de alta gama montados en vehículos de test se han obtenido errores RMS del orden de 0,1 m en autopistas abiertas y en torno a 0,5-1 m en cañones urbanos muy exigentes, manteniendo un rumbo estable cercano a 0,1° incluso en túneles largos.
En túneles, inevitablemente el error de posición va creciendo con la distancia recorrida sin GNSS, pero con un buen INS esa deriva se mantiene dentro de límites aceptables (por ejemplo, por debajo del 1,5‰ de la longitud del túnel), permitiendo que el vehículo mantenga una trayectoria coherente hasta recuperar señal y “reengancharse” con precisión al mapa.
Posicionamiento a 50 Hz y validación de sistemas autónomos
Más allá de la navegación en tiempo real para el propio vehículo, el posicionamiento de alta tasa de actualización es una pieza clave en el desarrollo, pruebas y validación de vehículos autónomos y ADAS. Para demostrar que un sistema es seguro, se necesitan datos de referencia (ground truth) mejores que la propia solución de a bordo.
Un sensor GPS CAN de 50 Hz, como los desarrollados por Metis Engineering, actúa como esa referencia independiente. Al proporcionar datos de posición, velocidad y tiempo 50 veces por segundo, permite reconstruir trayectorias con gran resolución y analizar cómo responde el sistema autónomo en milisegundos críticos, por ejemplo, en una maniobra de esquiva o en la aproximación a un paso de peatones con peatones en movimiento.
En automovilismo profesional, este tipo de sensores se usa para telemetría avanzada: los ingenieros correlacionan la posición exacta en pista con variables como presión de freno, ángulo de dirección, aceleración o cambios de marcha. De esta manera se identifican zonas donde se puede frenar más tarde, trazar mejor una curva o ajustar la aerodinámica. Es la misma lógica que luego se lleva a las pruebas de vehículos autónomos, donde cada decena de metro importa.
En el desarrollo de dinámica del vehículo, la alta frecuencia de actualización permite evaluar maniobras estandarizadas como cambios de carril rápidos, slaloms o pruebas de esquiva (moose test), analizando cuánto se desvía la trayectoria real de la trayectoria objetivo. Esta información es crucial para ajustar algoritmos de control de estabilidad, vectorización de par o asistentes de emergencia.
Para que estos sensores se integren fácilmente en vehículos de pruebas y bancos de ensayo industriales, se apoyan en interfaces CAN de automoción, con rangos de alimentación compatibles con sistemas de 12 V y 24 V, carcasas compactas y robustas, y conectores diseñados para soportar vibraciones, suciedad y cambios térmicos sin problemas.
GNSS, INS y otras aplicaciones industriales de posicionamiento de alta resolución
La misma tecnología que impulsa el posicionamiento en tiempo real para vehículos autónomos se está aplicando a un montón de campos donde la trayectoria, la velocidad y la sincronización fina son igual de importantes. En agricultura de precisión, por ejemplo, los sistemas de guiado automático necesitan precisión subdecimétrica para evitar solapes y huecos en labores de siembra, abonado o pulverización.
Gracias al posicionamiento de alta tasa de actualización, los equipos agrícolas activan y desactivan de forma extremadamente precisa los aplicadores de fertilizante, riego o fitosanitarios en los límites de las parcelas, reduciendo desperdicios y el impacto ambiental. Además, los mapas de rendimiento y suelos se alinean mejor con la realidad del terreno, haciendo más fiable la dosis variable.
En maquinaria de construcción y minería, los sistemas GNSS de alta resolución guían excavadoras, motoniveladoras o camiones de transporte, permitiendo controlar la posición de las cuchillas y los volúmenes de material movidos con una precisión inalcanzable de forma manual. Esto se traduce en menos sobreexcavación, menos rellenos adicionales y tiempos de obra más cortos.
Los sistemas de cartografía móvil montados en vehículos terrestres combinan GNSS/INS con LiDAR, cámaras panorámicas y otros sensores para generar mapas 3D de ciudades, carreteras o redes de servicios. Para que cada punto de la nube LiDAR quede bien georreferenciado se necesitan datos de navegación a frecuencias similares a las de adquisición de los sensores, algo que dispositivos INS especializados, como los de OXTS, proporcionan junto con software de georreferenciación dedicado.
En el mundo de los UAV y drones, el posicionamiento GNSS/INS de alta frecuencia mejora tanto la navegación autónoma como la calidad de la fotogrametría y la topografía aérea, al asociar cada imagen a una posición y orientación precisas incluso bajo ráfagas de viento o cambios bruscos de trayectoria. También resulta crítico para operaciones BVLOS (más allá de la línea de vista) donde el dron debe seguir rutas complejas con gran exactitud.
Mapas 3D de alta definición y su papel en la autonomía
Aunque a veces se dice que los vehículos autónomos podrían funcionar solo con sus sensores de a bordo, en la práctica los mapas 3D detallados siguen siendo fundamentales. Contar con un mapa previo permite descargar parte del trabajo del sistema de percepción y facilita que los algoritmos se centren en detectar lo que cambia: peatones, otros coches, obras, obstáculos inesperados, etc.
Estos mapas en tres dimensiones incluyen no solo la geometría de la vía, sino también edificios, árboles, señales, semáforos, elementos de mobiliario urbano y hasta detalles de la anchura de carriles o el peralte de las curvas. Empresas especializadas, como TomTom y varias firmas de cartografía móvil, invierten mucho en generar y mantener actualizada esta cartografía de alta definición.
Para construirlos, se despliegan vehículos de mapeo equipados con LiDAR, cámaras y sistemas GNSS/INS de alta precisión. El INS aporta la actitud (roll, pitch, yaw) y el GNSS, apoyado en correcciones diferenciales, fija la posición absoluta. El resultado son nubes de puntos densas y precisas que luego se procesan en nubes de puntos clasificadas, modelos de superficie o mapas orientados a la navegación autónoma.
La calidad final de estos mapas depende directamente de lo bueno que sea el sistema conjunto de posicionamiento. De poco sirve tener un LiDAR excelente si no se puede georreferenciar cada punto con la suficiente exactitud. Por eso los dispositivos INS para cartografía móvil incluyen filtros avanzados, integración estrecha con el GNSS y herramientas de posprocesado que corrigen incluso pequeñas desviaciones mediante datos de estación de referencia.
Al final, el vehículo autónomo se sitúa en tiempo real comparando lo que ve con lo que el mapa le dice que debería haber. Si hay una discrepancia importante (por ejemplo, una calle cortada por obras que no aparecía en el mapa), el sistema ajusta su planificación de ruta, avisa al usuario y, en algunos casos, envía información de actualización a la plataforma para que ese cambio se incorpore a futuros mapas.
Movilidad conectada, DGT 3.0 y balizas V16 geolocalizadas
La historia no termina en el propio vehículo. En España, la DGT está impulsando la plataforma DGT 3.0, que busca convertir las carreteras en entornos inteligentes donde los coches, las infraestructuras y los dispositivos de seguridad se comuniquen entre sí en tiempo real.
Uno de los elementos clave en este ecosistema es la baliza de emergencia V16 con geolocalización, que sustituirá definitivamente a los triángulos de emergencia a partir de 2026. Estas balizas, ofrecidas por fabricantes como SOOS, se colocan sobre el techo del vehículo averiado y, además de emitir una luz intermitente visible a gran distancia, envían su posición a la nube de la DGT mediante tecnologías NB-IoT o LTE-M.
Este envío automático de coordenadas permite que la DGT 3.0 comparta la ubicación del vehículo inmovilizado con otros usuarios conectados, servicios de asistencia y, en el futuro, vehículos autónomos. Así, un coche con capacidad V2X podría recibir la alerta de que hay un vehículo parado unos cientos de metros más adelante y adaptar su velocidad o trayectoria con antelación.
Estamos todavía en una fase de transición: hoy no existe un protocolo completamente estandarizado para que cualquier vehículo autónomo se comunique directamente con cualquier baliza V16 homologada, pero las tecnologías V2I (vehicle-to-infrastructure), V2V (vehicle-to-vehicle) y V2N (vehicle-to-network) marcan el camino. El objetivo es un ecosistema donde los dispositivos de seguridad vial, la infraestructura y los vehículos dialoguen de forma continua y segura.
Quedan por delante retos importantes: falta de estandarización de protocolos, interoperabilidad entre fabricantes, latencias en la transmisión de datos y cuestiones legales sobre privacidad y protección de datos de geolocalización. Aun así, el papel de marcas como SOOS, que ya ofrecen balizas preparadas para este futuro conectado con conectividad incluida durante muchos años, acelera la adopción de este tipo de soluciones.
Todo este entramado de GNSS avanzado, INS de alta calidad, posicionamiento a 50 Hz, mapas 3D detallados y dispositivos conectados como las balizas V16 con geolocalización está convergiendo hacia un mismo objetivo: lograr que los vehículos autónomos dispongan en cada instante de una visión clara, precisa y actualizada de dónde están, qué les rodea y cómo deben actuar. A medida que se pulen los estándares, se refuerzan los marcos legales y la tecnología sigue madurando, el posicionamiento en tiempo real se consolida como uno de los pilares más críticos sobre los que se construye la movilidad autónoma y conectada del futuro cercano.