
Arduino võib tunduda väga algeline, kuid sellest piisab isegi üsna arenenud projektide loomiseks. Mõnede turul olevate moodulite abil, näiteks kaameramoodulid, ning mõne teegi või API abil saate oma projektile pakkuda intelligentsust või kunstlik nägemine. See annab uusi rakendusi ja uusi silmaringi ka algprojektidest kaugemale.
Masinavisioon on arvutinägemise tüüp. See ei ole lihtsalt pildistamine digikaamera kaudu, vaid läheb kaugemale. Saab kasutada omandada keskkonnaandmeid, pilti töödelda, analüüsida, reaalsetest piltidest aru saada jne. Näiteks saab seda kasutada kaamera kaudu arvulise teabe saamiseks, inimeste tuvastamiseks jne. Kujutage ette kõike, mida saaksite sellega teha ...
Milleks arvutinägemist kasutatakse?
Por ejemplo, põhinevad paljud praegused nägemissüsteemid seda tüüpi nägemisel, näiteks mõned sõidukid, mis võimaldavad automaatset parkimist, keskkonna kaardistamist, liikluse juhtimissüsteeme teedel või tunnevad jalakäijad sõidukist peatuma ja neist üle sõitma, nägusid tuvastama ja andmed andmebaasi registreeritud inimestelt, näiteks mõnes turvasüsteemis, videote analüüsimine jne.
Selle masinnägemise potentsiaal on nii äärmuslik, et valitsused ja suured ettevõtted Nad kasutavad seda paljudel eesmärkidel, olenemata sellest, kas nad on seaduslikud või mitte. Mõned praktilised rakendusvaldkonnad, mida te kindlasti teate, on:
- Facebook: kasutage seda tüüpi kunstlikku nägemist oma sotsiaalsesse võrgustikku üles laaditud fotode jaoks, nii saate keeruliste algoritmide abil nägu ära tunda. Nii saate oma tehisintellekti toita, et muuta see võimsamaks ja täiustada seda teiste tulevaste rakenduste jaoks.
- Flickr- Selle masinvaate abil saate 3D-stseene rekonstrueerida, kasutades sellel platvormil olevaid pildihoidlaid.
- Tööstus: Kunstnägemissüsteemide abil saate tuvastada defekte konveieril, kiiresti defektidega esemeid visata jne. Näiteks kui põllumajandussektoris kogutud puuviljad liiguvad kunstliku nägemisanduri abil konveierilindi kaudu, võib õhujoa abil tuvastada purunenud, kahjustatud, mädanenud puuvilju või muid esemeid kui puuviljad. muud mehhanismid.
- Videovalve: seda saab kasutada paljudes kaitstud keskustes, et tabada teatud sõidukeid või inimesi, teada saada, kes nad on ja saata nimetatud teave süsteemi või salvestada hilisemaks analüüsiks. Paljud ettevõtted kasutavad seda isegi selleks, et teada saada, kuidas inimesed riietuvad (moesektor), teatud üksused, et teada saada, kes võiksid meeleavaldustel osaleda, tuvastada kahtlaste töötajate olemasolu avalikes või hõivatud keskustes jne.
Pidage meeles, et tänaval on laiali hulgaliselt igasuguseid valvekaameraid, olgu need siis ettevõtete, pankade, DGT jms jälgimiseks. meilt kõigilt kogutakse palju teavet...
Vajalik materjal
Lisaks Arduino tahvlile koos mikrokontrolleriga, mida saate programmeerida ja mis kasutab teeke, peate seda tegema ka teisi teie projekti põhielemente. Nende hulgas muidugi kaamera, mis on võimeline pilditöötluseks. Selle näiteks on Pixy CMUCam 5 või Sarnased. Sellel moodulil on võimas protsessor, mille saab programmeerida anduri poolt hõivatud teabe saatmiseks jadapordi UART, SPI, I2C, digitaalse väljundi või analoogsignaalide kaudu.
Pixy CMUCam 5 abil saate töödelda kuni 50 kaadrit sekundis (50 kaadrit sekundis). Nende võimaluste abil oleks võimalik programmeerida kogu soovitud või otsitud piltide saatmine selle asemel, et pidevalt kogu jäädvustatud videot salvestada. Lihtsama käsitsemise jaoks on sellel a tasuta ja avatud lähtekoodiga rakendus helistada piksimon teie kontrolli all.
Kui otsustate selle Pixy CMUcam5 kaamera osta, on see varustatud 6 kuni 10 kontaktiga IDC-kaabli ja kinnitusdetailidega. Lisaks, tehnilised omadused mooduli osad on:
- NXP LPC4330 204 Mhz DualCore protsessor.
- 254 Kb RAM-i mälu,
- 140mA tarbimine.
- Pildisensor Omnivision OV9715 1/4 ″ ja eraldusvõime 1280 × 800.
- Vaatenurk on horisontaalselt 75º ja vertikaalselt 47º.
- Objektide leidmiseks lihtne pildituvastus.
- Saate seda kasutada koos Arduino tahvlitega (koos konkreetsete teekidega), Raspberry Pi, BeagleBone Black ja muude sarnaste tahvlitega.
- Sidepordid: SPI, I2C, UART, USB või analoog- / digitaalväljund.
- PixyMoni tarkvara ühildub Windowsi, macOSi ja GNU / Linuxiga.
- Väike suurus.
- Dokumentatsioon on saadaval projekti Wiki kohta.
- Arduino raamatukoguga Githubi hoidlad.
- püsivara
- Giidid
Lisaks peate meeles pidama, et teie käsutuses on teist tüüpi API-d, teegid ja muu materjal mis aitab teil nende kaamerate ja kunstliku nägemise abil luua igasuguseid projekte. Näiteks tuleb märkida:
- OpenCV: on algselt Inteli välja töötatud tasuta masinnägude kogu. Nüüd on see välja antud BSD-litsentsi alusel ja seda saavad kõik kasutada liikumise tuvastamiseks, objektide tuvastamiseks, robotnägemiseks, näotuvastuseks jne. See on platvormidevaheline, nii et seda saab kasutada GNU / Linuxis, macOS-is, Windowsis ja Androidis.
- Muud projektid, näiteks sõiduki tuvastamine.
Hwlibre'ist alates soovitan teil alustada katsetada ja õppida selle distsipliini kohta...
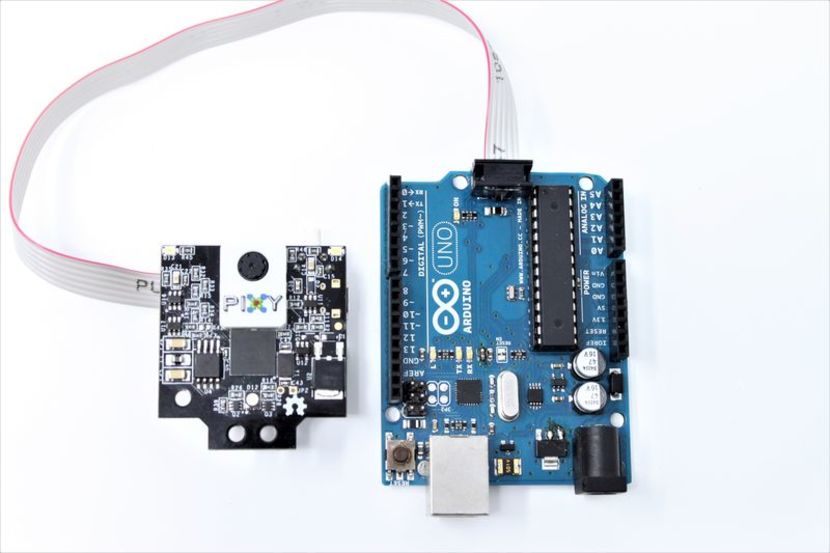
Lihtne näide Pixy 2 CMUcam5 integreerimisest Arduinoga

Selle kasutamiseks Pixy 2 CMUcam5 moodul koos teie Arduino plaadiga, mida peate kasutama mitmel lisaelemendil. Näiteks saate kasutage servomootorit Või S06NF või sarnane, tegutsema, kui kaamera tuvastab objekti, mille jaoks olete selle programmeerinud. Muidugi peate alla laadima PixyMoni tarkvara, mida ma ülalpool ütlesin, ja Ardino jaoks mõeldud GitHubi teegi.
Lisateavet Arduino programmeerimise kohta saate teha laadige alla meie PDF tasuta kursusega.
Kui olete seda teinud installitud PixyMon Järgige oma operatsioonisüsteemis neid samme:
- Ühendage Pixy USB-kaabli abil ja kontrollige, kas mooduli RGB LED põleb, mis näitab, et see töötab korralikult.
- Avage rakendus PixyMon ja kui kõik on õige, näete, mida kaamera sel hetkel pildistab.
- Minge alammenüüsse Tegevus või tegevusja klõpsake siis käsku Määra allkiri või Määra allkiri. Nüüd peaks video tarduma ja saate valida, millist värvi või objekti soovite kaamera tuvastada seni, kuni see on anduri ees. Näiteks võite kasutada palli. Nii tuvastatakse see alati, kui pall anduri eest möödub.
- Nagu näete, on kuni 7 Set Signature, nii et saate konfigureerida kuni 7 erinevat objekti, mida kaamera suudab tuvastada.
- Kui valite ainult ühe, saate liikuda järgmise sammu juurde. Või kui soovite objekti loendist kustutada, võite minna menüüsse Toiming või Toiming ja seejärel kustutada kõik Allkirjad või valige Kustuta konkreetne allkiri. Võite minna ka jaotisse Konfiguratsioon või Konfiguratsioon ja seejärel minna konkreetse allkirja juurde, mida soovite selle muutmiseks muuta.
Nüüd saate jätkata oma parda konfigureerimist Arduino, kui sa tahad. Selleks teate juba, et peate Arduino jaoks kasutama Pixy teeki. Selles raamatukogus on ka lihtsad näited, millega saate katsetama hakata, kirjutamata koodi nullist. Lihtsalt avades need ja käivitades need visandid või tehes neile muudatusi, et näha, kuidas nad käituvad. Selle teegi kasutamiseks võite järgida neid samme.
- Rohu Arduino raamatukogu.
- Avatud Arduino IDE.
- Mine visandisse, Kaasa teek ja seejärel lisage .zip-teek ja valige allalaaditud.
- Nüüd on see integreeritud, saate seda teha hakake mõnda näidet katsetama Arduino tahvliga korralikult ühendatud kaameraga. Selleks minge menüüsse Näited või Näited, seejärel Pixy juurde ja valige üks neist. Ma soovitan teil alustada Tere, Maailm.
- Teie Arduino pardal ühendatud USB arvutisse, laadige visand üles oma tahvlile, seejärel valige Tools ja seejärel Serial Monitor.
- Nüüd hakkab aken teile teavet näitama.
Muidugi ärge unustage ühendada kõiki elektroonilisi komponente peate oma Arduino pardal, sealhulgas kaamera ise. Nagu juba pildilt näha, ühendub see juba nende moodulite jaoks mõeldud Arduino ISCP tihvtidega ...