
Mechatronica is een discipline die mechanica combineert met elektronica, omdat het een multidisciplinaire tak van engineering is die put uit robotica, elektronica, computers, telecommunicatie, besturing, enz. Om verder te gaan dan elektronische doe-het-zelfprojecten en te gaan experimenteren met mechatronische projecten, kun je apparaten zoals de motoren of lineaire actuator voor uw Arduino.
Dat opent je een nieuwe wereld van mogelijkheden voor makers. In feite is deze lineaire actuator het meest praktisch met de mogelijkheid om mobiele acties uit te voeren of kracht uit te oefenen op andere elementen. Meer weten? We vertellen je ...
Soorten lineaire actuatoren

Er zijn verschillende soorten actuatoren, hoewel we ons in dit artikel zullen concentreren op degene die een elektromotor gebruikt om de plunjer aan te drijven. Maar u moet weten dat er ook andere soorten kunnen zijn:
- Hydraulica: Ze gebruiken een soort vloeistof om de zuiger te bewegen. Een voorbeeld kan zijn dat van veel landbouwmachines of graafmachines, die deze zuigers en de oliedruk gebruiken om de scharnierende armen, hydraulische persen, enz. Te bewegen.
- elektrisch: het zijn actuatoren die een eindeloze schroef gebruiken die wordt bewogen door een elektromotor om de beweging te genereren. Er zijn ook solenoïde-type (elektromagneet), die een magnetisch veld gebruiken om de zuiger of plunjer te bewegen en een veer om deze terug te brengen naar zijn oorspronkelijke positie wanneer dat veld niet wordt uitgeoefend. Een praktisch voorbeeld kan het laatste voorbeeld zijn dat ik in dit artikel presenteer, of ook vele anderen van robotica, gewone mechanische apparaten, enz.
- Banden: ze gebruiken lucht als vloeistof, in plaats van vloeistof zoals bij hydraulica. Een voorbeeld hiervan zijn de typische lineaire actuatoren die te vinden zijn in de technologiewerkplaatsen van sommige educatieve centra.
Het uiteindelijke doel van dit apparaat is transformeer een energie hydraulisch, elektrisch of pneumatisch in een lineaire stuwkracht in dit geval, waardoor kracht wordt uitgeoefend, stuwkracht, fungeert als een regelaar, een ander mechanisme wordt geactiveerd, enz.
Over elektronische lineaire actuator
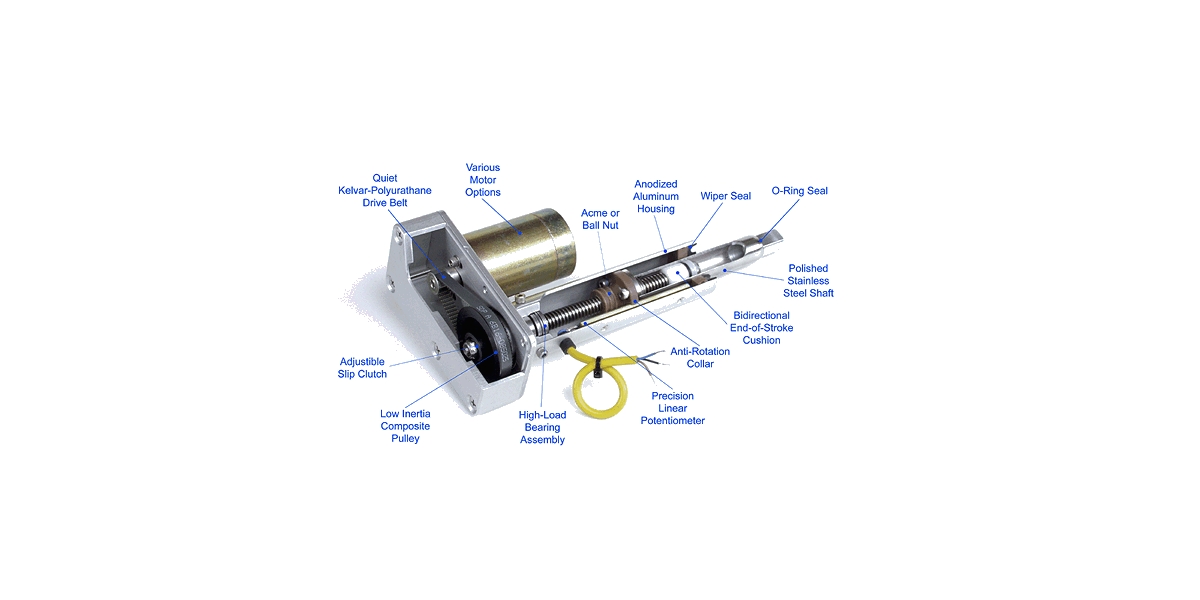
In feite een elektrische lineaire actuator het is soms niet meer dan een elektromotor kan een NEMA zijn zoals al gezien. Deze motor draait zijn as, en door middel van een combinatie van tandwielen of tandkettingen zal hij een schroef zonder einde draaien. Deze eindloze schroef zorgt ervoor dat een zuiger of stang in een of andere richting wordt verschoven (afhankelijk van de draairichting).
Ese plunjer het zal degene zijn die dient als een actuator om iets te duwen, iets te trekken, een kracht uit te oefenen, enz. De toepassingen zijn vrij breed. Zoals je kunt zien, is het iets heel eenvoudigs dat niet al te veel mysteries bevat.
Deze lineaire actuatoren hebben, in tegenstelling tot andere niet-lineaire, het voordeel dat ze kunnen uitoefenen grote krachten en verplaatsingen aanzienlijk (afhankelijk van het model). Maar voor Arduino heb je enkele modellen die kunnen gaan van 20 tot 150 Kgf (kilogramkracht of kilopond) en verplaatsingen van 100 tot 180 mm.
Een groot nadeel is zijn snelheid van verplaatsingOmdat door het uitoefenen van deze enorme krachten, de reductiewielen die nodig zijn om het koppel te verhogen, de snelheid van uitschuiven en intrekken verlagen. Op typische modellen kunnen snelheden van 4 tot 20 mm / s worden opgegeven. Dit betekent dat om het hele lineaire proces te voltooien, het kan gaan van enkele tientallen seconden tot een paar minuten in het geval dat het langer en langzamer is ...
Wat zijn voeden, je hebt ze van verschillende voltages of voltages. Het gebruikelijke is bijvoorbeeld dat ze 12 of 24v zijn, hoewel je er hieronder en daarboven enkele kunt vinden. Wat hun verbruik betreft, ze kunnen in sommige gevallen variëren van 2A tot 5A. Zoals je kunt zien, is het een krachtige motor, dus het verbruik is hoog ... Dus als je van plan bent hem te voeren met batterijen, moet u bedenken dat ze over de nodige capaciteit beschikken.
Lineaire actuatorregeling
De elektrische lineaire actuator die u voor Arduino kunt vinden, kan verschillende soorten hebben controle:
- Met potmeter: door middel van een potentiometer kunnen ze de positie van de zuiger selecteren.
- Met einde carrière: een eindschakelaar aan elk uiteinde zorgt ervoor dat hij vanzelf stopt zodra hij de top bereikt.
- Uit de hand: ze hebben geen van de bovenstaande controlesystemen.
Pinout
El pinout van een lineaire actuator kan niet eenvoudiger. Het heeft twee geleidende kabels om de elektromotor die erin is geïntegreerd te voeden, en niets meer dan dat. Geen complicaties dus. Het enige waarmee u rekening moet houden bij het in- of uitschuiven van de stuurpen is dat de rotatie van de motor moet worden omgekeerd (stroompolariteit).
Om dat mogelijk te maken, kunt u gebruik een H-bridge controller zoals degene die wordt gebruikt voor gelijkstroommotoren. Je zou kunnen denken dat iemand zoals hij je dient L298Nkan zijn, of anderen gezien, zoals TB6612FNG, etc. Maar de waarheid is dat geen van hen voldoende vermogen heeft voor deze lineaire actuatoren (als ze groot zijn). Daarom zou de controller doorbranden.
Daarom kun je alleen bouwen uw eigen snelheidsregeling met behulp van transistors zoals BJT's of MOSFET's, en zelfs relais vaste toestand ...
Waar een lineaire actuator kopen?
El prijs van de lineaire actuator hangt grotendeels af van de grootte, snelheid, lengte en ook van de kracht die deze kan weerstaan. Je kunt ze meestal vinden tussen de € 20 en € 200. En je vindt ze gemakkelijk in gespecialiseerde elektronicawinkels of in andere online winkels zoals Amazon. Bijvoorbeeld:
- Sourcingmap solenoïde actuator die een kracht van 400 g en 4 mm kan uitoefenen
- Justech DC 12V lineaire actuator tot 72 kg en 150 mm veerweg
- LHQ-HQ DC 12v met capaciteit voor 80 kg en 50 mm veerweg
- Seafront 12V tot 300 mm en 150 kg ondersteund gewicht (geschat voor 50 mm)
- Geen producten gevonden.
Veel van deze producten zijn beschermd tegen stof en spatten door het IPX54-certificaat. En houd rekening met de aanbevelingen van de fabrikant, de aangegeven gewichten worden niet altijd ondersteund voor alle verlengingslengtes, in sommige gevallen wordt alleen een bepaald limietgewicht ondersteund tot een bepaalde extensie.
Integratie met Arduino
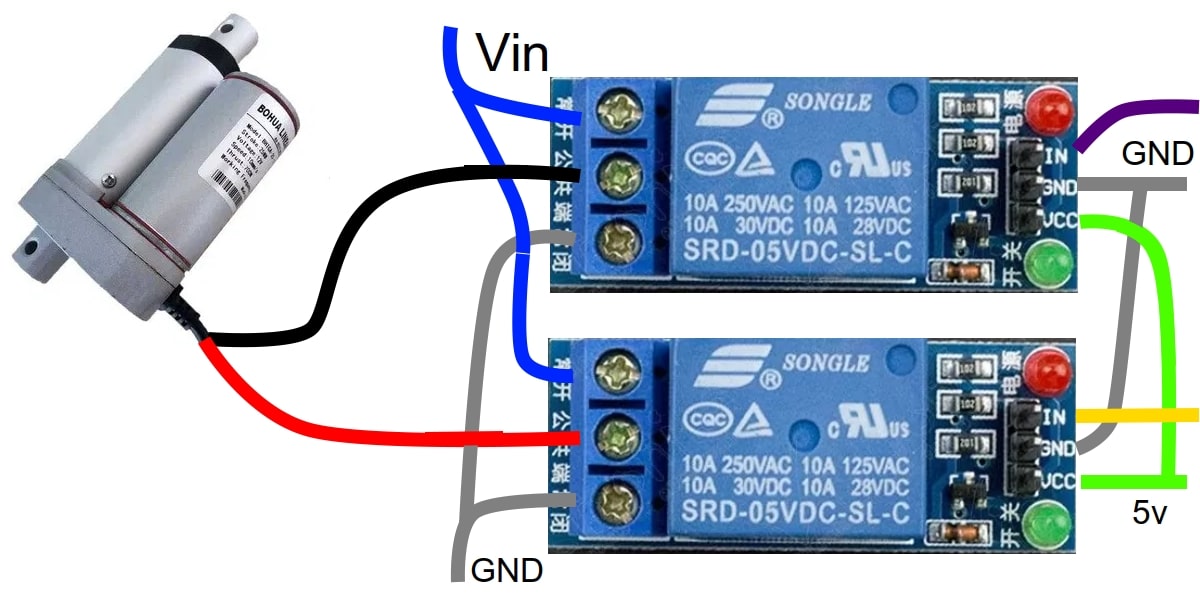
Dit soort actuatoren kunnen verschillende praktische toepassingen hebben als u ze integreert met uw Arduino-bord. Om dit te doen, is het eerste dat u moet weten, de manier waarop u dat kunt maak het aansluitschema met je badge. Zoals u kunt zien, is het helemaal niet ingewikkeld, dus het levert niet al te veel complicaties op.
Zoals je kunt zien aan de hand van het bovenstaande schema dat ik heb getekend, heb ik twee relais en een lineaire actuator gebruikt. De gekleurde lijnen je ziet staan voor het volgende:
- rood en zwart: zijn de kabels van de lineaire actuator die naar elk van de gebruikte relais gaan.
- Grijs: je hebt verbinding met aarde of GND in elk van de relais, zoals je kunt zien.
- Azul: het gaat naar de voeding Vin voor het relais, in dit geval zal het tussen 5v en 12v zijn.
- Planeet: de Vcc-lijnen van de module zijn verbonden met 5v van je Arduino-bord.
- Grijs: ook massa, verbonden van de module naar de Arduino GND.
- Paars en oranje: zijn de controlelijnen die naar een van de Arduino-pinnen gaan om de spin te regelen. U kunt bijvoorbeeld naar D8 en D9 gaan.
Wat betreft het voorbeeld van broncode voor uw Arduino IDE, zou de schets voor de basisbesturing als volgt zijn:
//configurar las salidas digitales
const int rele1 = 8;
const int rele2 = 9;
void setup()
{
pinMode(rele1, OUTPUT);
pinMode(rele2, OUTPUT);
//Poner los relés a bajo
digitalWrite(rele1, LOW);
digitalWrite(rele2, LOW);
}
void loop()
{
extendActuator();
delay(2000);
retractActuator();
delay(2000);
stopActuator();
delay(2000);
}
//Activar uno de los relés para extender el actuador
void extendActuator()
{
digitalWrite(rele2, LOW);
delay(250);
digitalWrite(rele1, HIGH);
}
//Lo inverso a lo anterior para retraer el émbolo
void retractActuator()
{
digitalWrite(rele1, LOW);
delay(250);
digitalWrite(rele2, HIGH);
}
//Poner ambos releś apagados parar el actuador
void stopActuator()
{
digitalWrite(rele1, LOW);
digitalWrite(rele2, LOW);
}
U wijzig de code om desgewenst de plunjer in specifieke posities te kunnen bedienen en positioneren, of meer elementen toe te voegen ...