
Mechatronics is a discipline that mixes mechanics with electronics, being a multidisciplinary branch of engineering that draws on robotics, electronics, computing, telecommunications, control, etc. To go beyond electronic DIY projects, and start experimenting with mechatronic projects, you can start integrating devices like the engines or linear actuator for your Arduino.
That opens you a new world of possibilities for makers. In fact, this linear actuator is the most practical with the ability to perform mobile actions or exert force on other elements. Do you want to know more? We tell you ...
Types of linear actuators

There are several types of actuators, although in this article we will focus on the one that uses an electric motor to drive the plunger. But you should know that there may also be other types:
- Hydraulics: they use some type of fluid to move the piston, an example can be that of many agricultural machines or excavators, using these pistons and the oil pressure to move the articulated arms, hydraulic presses, etc.
- Electric: they are actuators that use an endless screw moved by an electric motor to generate the movement. There are also solenoid type (electromagnet), which use a magnetic field to move the piston or plunger and a spring to return it to its original position when that field is not being exerted. A practical example can be the final example that I present in this article, or also many others of robotics, common mechanical devices, etc.
- Tires: they use air as a fluid, instead of a liquid as in the case of hydraulics. An example of these are the typical linear actuators found in the technology workshops of some educational centers.
The ultimate goal of this device is transform an energy hydraulic, electric or pneumatic in a linear thrust in this case, thus exerting force, thrust, acting as a regulator, activating some other mechanism, etc.
About electronic linear actuator
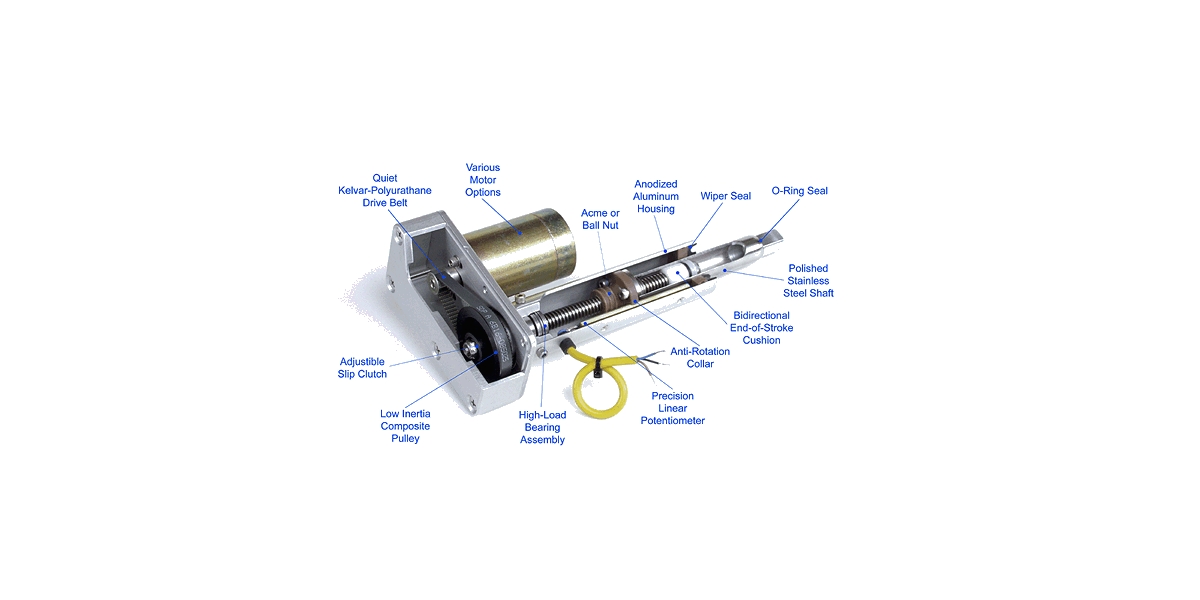
Basically a electric linear actuator it is nothing more than an electric motor, sometimes can be a NEMA as already seen. This motor rotates its shaft, and by means of a combination of gears or toothed chains it will rotate an endless screw. This endless screw will be in charge of sliding a piston or rod in one direction or another (depending on the direction of rotation).
That plunger it will be the one that serves as an actuator to push something, to pull something, to exert a force, etc. The applications are quite wide. As you can see, it is something quite simple that does not hold too many mysteries.
These linear actuators, unlike other non-linear ones, have the advantage of being able to exert large forces and displacements considerable (depending on the model). But for Arduino, you have some models that can go from 20 to 150 Kgf (kilogram force or kilopond), and displacements of 100 to 180 mm.
As a great disadvantage is its velocity of displacementBecause by exerting these enormous forces, the reduction wheels needed to increase torque will lower the speed of extension and retracting. Speeds of 4 to 20 mm / s can be given on typical models. This means that to complete the entire linear process, it can go from a few dozen seconds to a few minutes in case of being longer and slower ...
As to its eating, you have them of various voltages or voltages. For example, the usual thing is that they are 12 or 24v, although you can find some below and above that. As for their consumption, they can range from 2A to 5A in some cases. As you can see, being a powerful engine, consumption is high ... So if you plan to feed it with batteries, you must consider that they have the necessary capacity.
Linear actuator control
The electric linear actuator you can find for Arduino could have various types of control:
- With potentiometer: by means of a potentiometer they allow to select the position of the piston.
- With end of career: a limit switch at each end will make it stop on its own once it reaches the top.
- Out of control: they do not have any of the above control systems.
Pinout
El Pinout of a linear actuator could not be simpler. It has two conductive cables to feed the electric motor that it integrates, and nothing more than that. Therefore, zero complications. The only thing to keep in mind to extend or retract the stem is that the rotation of the motor must be reversed (current polarity).
For that to be possible you can use an H-bridge controller like the one used for direct current motors. You might think that someone like him serves you L298NIn others seen, such as TB6612FNG, etc. But the truth is that none of them has enough power for these linear actuators (if they are large). Therefore, the controller would burn out.
Therefore, you can only build your own speed control using transistors like BJTs or MOSFETs, and even relays solid state ...
Where to buy a linear actuator?
El price of the linear actuator will largely depend on the size, speed, length, and also the force that it can withstand. You can usually find them from around € 20 to € 200. And you will easily find them in specialized electronics stores or other online stores such as Amazon. For example:
- Sourcingmap solenoid actuator capable of exerting a force of 400g and 4mm
- Justech DC 12V linear actuator up to 72kg and 150mm travel
- LHQ-HQ DC 12v with capacity for 80 kg and 50mm of travel
- Seafront 12V up to 300mm and 150kg weight supported (estimated for 50mm)
- No products found.
Many of these products are protected against dust and splashes by the IPX54 certificate. And keep in mind the manufacturer's recommendations, the indicated weights are not always supported for all extension lengths, in some cases only a certain limit weight is supported up to a certain extension.
Integration with Arduino
These types of actuators can have varied practical uses if you integrate them with your Arduino board. To do this, the first thing you should know is the way in which you can make the connection diagram with your badge. As you can see, it is not complicated at all, so it does not present too much complication.
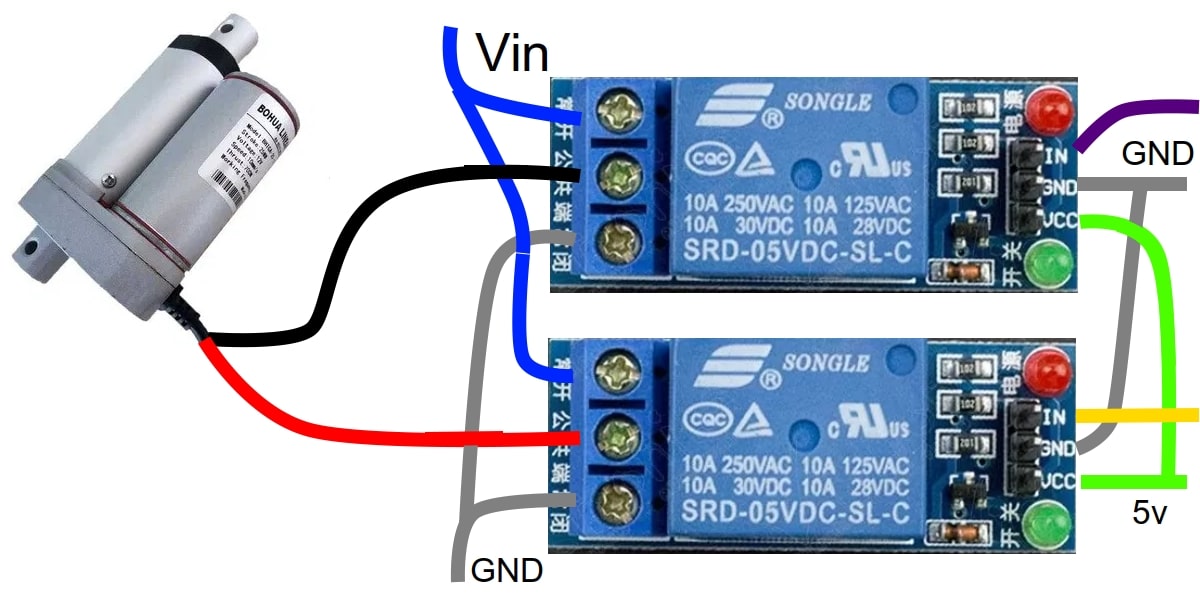
As you can see from the above schematic I have drawn, I have used two relays and a linear actuator. The colored lines that you see represent the following:
- Red and black: are the cables of the linear actuator that will go to each of the relays used.
- Grey: you have connected to ground or GND in each of the relays as you can see.
- BLUE: it goes to the power supply Vin for the relay, in this case it will be between 5v and 12v.
- Verde: the Vcc lines of the module are connected to 5v of your Arduino board.
- Grey: also ground, connected from the module to the Arduino GND.
- Purple and orange: are the control lines that will go to any of the Arduino pins to control the spin. For example, you can go to D8 and D9.
As for the example of source code for your Arduino IDE, the sketch for the basic control would be as follows:
//configurar las salidas digitales
const int rele1 = 8;
const int rele2 = 9;
void setup()
{
pinMode(rele1, OUTPUT);
pinMode(rele2, OUTPUT);
//Poner los relés a bajo
digitalWrite(rele1, LOW);
digitalWrite(rele2, LOW);
}
void loop()
{
extendActuator();
delay(2000);
retractActuator();
delay(2000);
stopActuator();
delay(2000);
}
//Activar uno de los relés para extender el actuador
void extendActuator()
{
digitalWrite(rele2, LOW);
delay(250);
digitalWrite(rele1, HIGH);
}
//Lo inverso a lo anterior para retraer el émbolo
void retractActuator()
{
digitalWrite(rele1, LOW);
delay(250);
digitalWrite(rele2, HIGH);
}
//Poner ambos releś apagados parar el actuador
void stopActuator()
{
digitalWrite(rele1, LOW);
digitalWrite(rele2, LOW);
}
You can modify the code to be able to control and position the plunger in specific positions if you wish, or add more elements ...