
Muchos proyectos electrónicos necesitan de un elemento de gobernación, y eso pasa por tener un giroscópio o giróscopo. Este elemento además puede detectar movimientos o giros del dispositivo, y ayudar a generar una reacción frente a ese movimiento. Por ejemplo, si se trata de un mando, podría hacer girar hacia el sentido que el usuario quiera para manejar algún elemento o un videojuego.
Las aplicaciones de un giroscópio, como puedes imaginar son muchas, como el que integran los smartphones para poder saber cuándo se ha girado la pantalla y realizar alguna acción de control sobre el sistema operativo, para manejar los vehículos o personajes de videojuegos, etc. También se integra en algunos portátiles para determinar que el equipo se ha caído y así poder apagar a tiempo el disco duro (HDD) para evitar que el cabezal impacte contra el disco giratorio y se rompa, etc.
También se pueden usar para sistemas de orientación, para saber para dónde se dirige un dispositivo. Eso sirve tanto para robots autónomos, y otros sistemas que necesitan orientarse adecuadamente sin intervención o con intervención del usuario. Los drones también tienen este tipo de elementos instalados, e incluso las gafas de realidad virtual, realidad aumentada o mixta, para poder adecuar la imagen que se ve según el movimiento del usuario…
También en la industria militar ha tenido muchas aplicaciones, como la de poder servir para orientar a los primeros cohetes y misiles que podían orientarse hasta un objetivo de una mejor forma gracias a estos giroscopios. Además, ésto unido a los modernos sistemas de satélite como el GPS, pueden llegar a tener precisiones muy altas.
Como puedes comprobar, las aplicaciones son muchas, y seguro que tú, como maker, tienes más en tu cabeza para tu futuro proyecto DIY…
Un poco de historia
El sentido de la orientación ha sido necesario desde muchos años atrás, especialmente con la navegación. Los primeros sistemas se basaron en una peonza, como el del siglo XVIII del británico John Serson. Con él pretendía darle otra utilidad a la peonza para poder localizar el horizonte en alta mar cuando la visibilidad era reducida o nula.
Poco a poco los artilugios de orientación fueron evolucionando hasta el primer giroscopio como tal no llegaría hasta 1852, con el invento de Foucault. Surgió como producto de un experimento para demostrar la rotación de la Tierra. Un elemento con un péndulo que podía dejar patente ese giro de forma simple.
Poco a poco los dispositivos mecánicos fueron evolucionando con la proliferación de la industria aeronáutica, y militar, para torpedos y misiles. Hay que destacar en este sentido el giróscopo de Sperry Corp, para la industria militar y que se transformó en uno de los primeros conceptos direccionales y modernos.
Tras eso, se comenzarían a perfeccionar, reducir de tamaño, aumentar en cuanto a precisión hasta llegar a los actuales sistemas electrónicos y miniaturizados gracias a tecnologías como MEMS. De esto ya vimos algo en el artículo del MPU6050 de este mismo blog.
¿Cómo funciona un giroscópio?
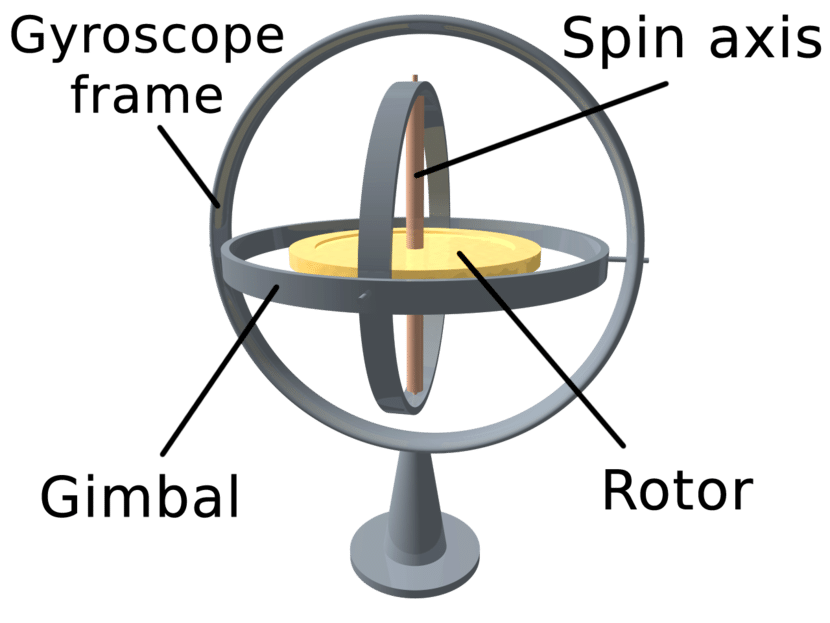
El giróscopo o giroscópio se basa en el efecto giroscopio. Esto es un fenómeno que se da cuando un dispositivo formado por un disco montado sobre un eje horizontal, alrededor del cual el disco gira libremente a gran velocidad. Si un observador mantiene el eje del fondo con la mano izquierda y el eje de delante con la derecha, al bajar la mano derecha y subir la izquierda, sentirá un comportamiento muy peculiar.
Lo que sentirá el observador es que el giroscopio empuja su mano derecha y tira de su mano izquierda. Eso es lo que se conoce como efecto giroscópio. No sé si alguna vez has sujetado en tu mano un disco duro mecánico (HDD) con velocidades de giro altas (7200 RPM), cuando está en funcionamiento, pero seguramente observarás que tiene cierta inercia cuando lo mueves, algo así es esto de lo que te hablo aquí…
Pues bien, ese fenómeno es usado por los giroscópios convencionales para poder saber cuándo se produce un movimiento. Aunque los actuales dispositivos microelectrónicos integrados en los dispositivos tecnológicos, a los que se hace referencia en este artículo, son sofisticados elementos que captan el desplazamiento angular por unidad de tiempo o lo rápido que gira un cuerpo alrededor de su eje, usando otro efecto diferente.
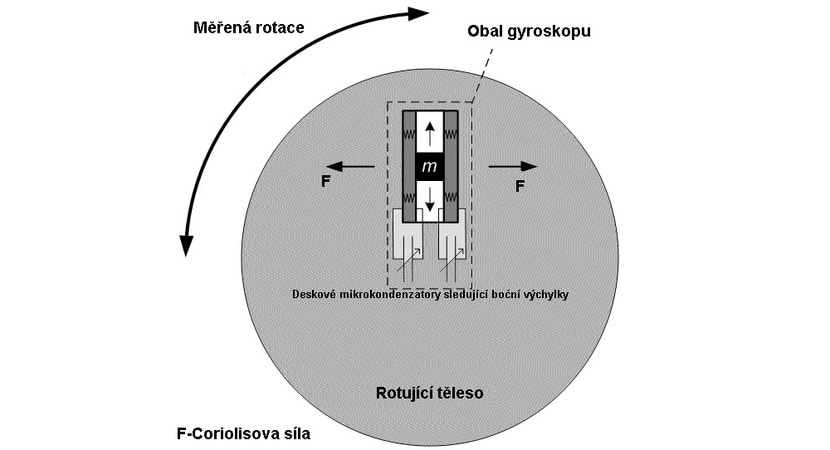
Consiguen precisiones muy buenas gracias a la MEMS con un efecto conocido esta ve como Coriolis. En este caso, fue descubierto por el francés Gaspard-Gustave Coriolis en 1836. El efecto observa en un sistema de referencia en rotación cuándo un cuerpo se encuentra en movimiento respecto a dicho sistema de referencia. Consiste en una aceleración relativa del cuerpo en dicho sistema de rotación. Dicha aceleración siempre será perpendicular al eje de rotación del sistema y a la velocidad del cuerpo.
El objeto en este caso sufre una aceleración desde el punto de vista del observador en rotación, como si existiera una fuerza irreal sobre el objeto que lo acelera. Es una fuerza de Coriolis de tipo inercia o ficticia, gracias a la cual se puede medir la velocidad angular, integrando la velocidad angular respecto al tiempo, el desplazamiento angular, o simplemente saber si un objeto se ha movido…
Concretamente, en un sensor de tipo MEMS, tienes un pequeño chip dentro del que se ha implementado un giroscópio de un tamaño que oscila entre 1 a 100 micrómetros, es decir, incluso inferior a un cabello humano. Este dispositivo es suficiente para que cuando se hace girar, una pequeña masa de resonancia se desplace con los cambios de velocidad angular, produciendo a su vez señales eléctricas de muy baja corriente que serán leídas e interpretadas por la circuitería de control.
Características que debes observar en un giroscópio

Algunas de las características que deberías tener en cuenta a la hora de elegir un giroscópio para tu proyecto eson:
- Rango: máxiam velocidad angular que será capaz de medir no debe exceder del rango máximo del giroscópio que elijas. No obstante, también deberías tener la mejor sensibilidad posible, y eso se consigue haciendo que el rango del giroscópio no sea muy superior a lo que necesitas.
- Interfaz: no es demasiado problema, ya que el 95% de los giroscópios del mercado tienen salida analógica, aunque hay algunos con interfaz digital de tipo SPI o bus I2C.
- Número de ejes: al igual que en los acelerómetros, es algo muy importante. No suelen tener tantos ejes disponibles como en el caso de los acelerómetros, pero mientras más mejor. En la actualidad han comenzado a aparecer algunos de 3-ejes, lo cual es algo muy bueno. Pero la mayoría de modelos tiene 1 o 2 ejes, que deberían ser suficientes para la mayor parte de proyectos. En los de 3 ejes deberás consultar la información del modelo para saber qué eje mide el giro, ya que los otros dos pueden medir también el cabeceo y balanceo de un objeto, mientras que otro miden el cabeceo y guiñada.
- Consumo: otra de las características importantes, ya que si tu proyecto depende de una batería o pila debes elegir uno que consuma poca energía. Por lo general no es demasiado, el consumo medio suele serd de unos 100 micro amperios. Algunos más avanzados tendrán función de suspensión de energía cuando no se están usando.
- Extras: puede que algunos tengan algún extra, como sensores acelerómetros, medidores de temperatura, etc., en el mismo módulo.
Además, si compras módulos, tendrán el chip y un PCB con algunos extras que te facilitarán su integración con Arduino, por ejemplo, aportando pines de conexión y alimentación, etc.
Giroscopios que puedes comprar
Existen varios giroscópios que puedes comprar como el MPU6050 que incluye también acelerómetro. Ya lo describimos en otro artículo, pero además de ese, hay otros que puedes integrar fácilmente en tus proyectos electrónicos junto con Arduino.
- Puedes comprar un giroscópio como el STMicroelectronics LPY503AL. Es uno de los más populares, y puedes leer su datasheet aquí.
- También puedes usar el sensor inercial como los No products found.,No products found. e No products found., además del MPU6050…
Su conexión e integración con Arduino va a depender de cada modelo y fabricante. Pero no es complicado. Puedes consultar sus datasheets y pinout para saber cómo gestionarlos. La cuestión está en saber cómo funcionan para saber calcular el desplazamiento angular y que tu código en Arduino IDE lo interprete y genere una acción en consecuencia…