Många elektroniska projekt behöver ett styrelement, och det händer genom att ha en gyro eller gyroskop. Detta element kan också upptäcka rörelser eller vändningar på enheten och hjälpa till att generera en reaktion mot den rörelsen. Om det till exempel är ett kommando kan det rotera i den riktning som användaren vill styra ett element eller ett videospel.
den tillämpningar av ett gyroskop, som du kan föreställa dig att det finns många, till exempel den som är integrerad av smartphones för att kunna veta när skärmen har roterats och utföra vissa kontrollåtgärder på operativsystemet, för att hantera fordon eller videospelkaraktärer etc. Den är också integrerad i vissa bärbara datorer för att bestämma att utrustningen har tappats och därmed kunna stänga av hårddisken (HDD) i tid för att förhindra att huvudet slår på den roterande skivan och går sönder, etc.
De kan också användas till styrsystem, för att veta vart en enhet ska gå. Detta tjänar både för autonoma robotar och andra system som måste orienteras ordentligt utan ingripande eller med användarens ingripande. Dronerna har också den här typen av element installerade, och till och med virtual reality-glasögon, förstärkt eller blandad verklighet, för att kunna anpassa bilden som ses enligt användarens rörelse ...
Också i militär industri Det har haft många applikationer, som att kunna styra de första raketerna och missilerna som kunde orienteras mot ett mål på ett bättre sätt tack vare dessa gyroskop. Dessutom kan detta, tillsammans med moderna satellitsystem som GPS, ha mycket hög precision.
Som du kan se, applikationerna är många, och säkert har du som tillverkare mer i ditt huvud för ditt framtida DIY-projekt ...
Lite historia
El känsla för orientering det har varit nödvändigt i många år, särskilt med navigering. De första systemen baserades på en snurrplatta, som den från XNUMX-talet av britten John Serson. Med den avsåg han att använda snurrtoppen ännu en gång för att kunna lokalisera horisonten på öppet hav när sikten var nedsatt eller noll.
Lite efter lite utvecklades orienteringsanordningarna fram till det första gyroskopet som sådant skulle gå upp till 1852, med Foucaults uppfinning. Det framkom som en produkt av ett experiment för att demonstrera jordens rotation. Ett element med en pendel som kan visa den vändningen på ett enkelt sätt.
Så småningom utvecklades mekaniska anordningar med spridningen av flyg- och militärindustrin för torpeder och missiler. Det är nödvändigt att i denna mening betona Sperry Corp gyro, för militärindustrin och det blev ett av de första riktade och moderna koncepten.
Efter det skulle de börja förfina, minska i storlek, öka i termer av precision tills de når de nuvarande systemen elektroniskt och miniatyriserat tack vare tekniker som MEMS. Från detta såg vi redan något i MPU6050 artikel från den här bloggen.
Hur fungerar ett gyroskop?
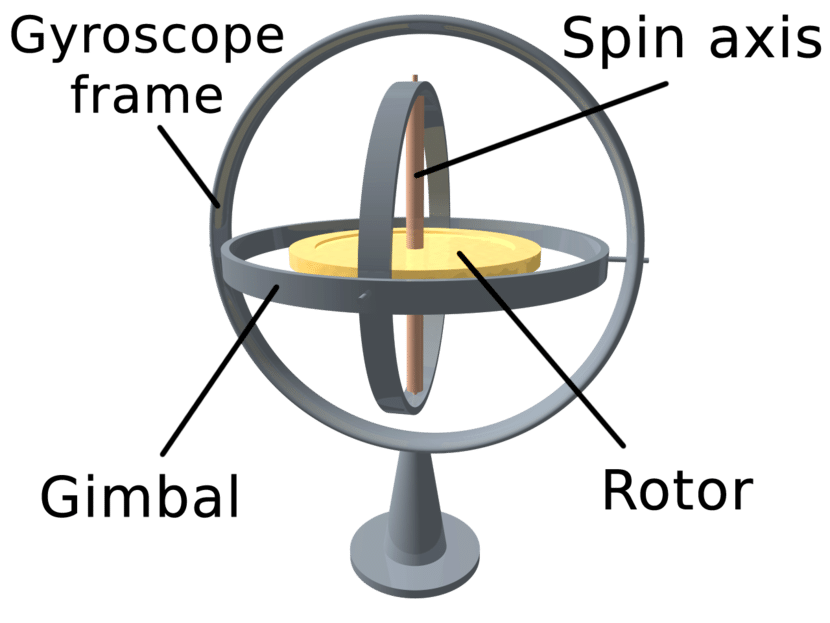
Gyroskopet eller gyroskopet är baserat på gyroskopeffekt. Detta är ett fenomen som uppstår när en enhet bildad av en skiva monterad på en horisontell axel, runt vilken skivan roterar fritt med hög hastighet. Om en observatör bibehåller bakgrundsaxeln med vänster hand och frontaxeln med höger, när han sänker höger hand och höjer vänster, kommer han att känna ett mycket märkligt beteende.
Vad observatören kommer att känna är det gyroskopet skjuter din högra hand och drar din vänstra hand. Detta är vad som kallas gyroskopeffekten. Jag vet inte om du någonsin har hållit en mekanisk hårddisk (HDD) i din hand med höga rotationshastigheter (7200 rpm) när den är igång, men du kommer säkert att märka att den har viss tröghet när du flyttar den, det här är vad jag pratar med dig här ...
Tja, detta fenomen används av konventionella gyroskop för att kunna veta när en rörelse inträffar. Även om den nuvarande inbäddade mikroelektroniska enheter I de tekniska enheterna, som det hänvisas till i den här artikeln, är de sofistikerade element som fångar vinkelförskjutningen per tidsenhet eller hur snabbt en kropp roterar runt sin axel med en annan effekt.
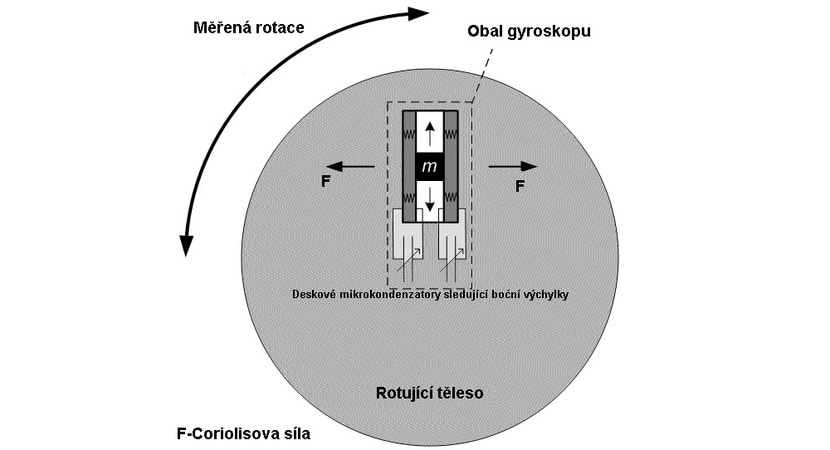
De får mycket bra precisioner tack vare MEMS med känd effekt ser ut som Coriolis. I detta fall upptäcktes det av fransmannen Gaspard-Gustave Coriolis 1836. Effekten observeras i en roterande referensram när en kropp är i rörelse i förhållande till nämnda referensram. Den består av en relativ acceleration av kroppen i nämnda rotationssystem. Nämnda acceleration kommer alltid att vara vinkelrät mot systemets rotationsaxel och kroppens hastighet.
Objektet i detta fall genomgår en acceleration ur den roterande observatörens synvinkel, som om det fanns en overklig kraft på objektet som accelererar det. Det är en Coriolis-kraft av tröghet eller fiktiv typ, tack vare vilken den kan vara mäta vinkelhastighet, integrera vinkelhastigheten med avseende på tid, vinkelförskjutning eller helt enkelt veta om ett objekt har rört sig ...
Specifikt i en MEMS-sensor, har du ett litet chip inuti som har implementerats ett gyroskop med en storlek som sträcker sig från 1 till 100 mikron, det vill säga ännu mindre än ett människohår. Denna anordning är tillräcklig så att när den roteras, rör sig en liten resonansmassa med förändringar i vinkelhastigheten, vilket i sin tur producerar elektriska signaler med mycket låg ström som kommer att läsas och tolkas av styrkretsarna.
Egenskaper som du bör observera i ett gyroskop

Några av de egenskaper som du bör ta hänsyn till när det gäller välj en gyro för ditt projekt eson:
- Rango: maximal vinkelhastighet som den kommer att kunna mäta får inte överstiga det maximala intervallet för det gyroskop du väljer. Du bör dock också ha bästa möjliga känslighet, och det uppnås genom att göra gyroområdet inte mycket högre än du behöver.
- gränssnitt: Det är inte så mycket av ett problem, eftersom 95% av gyroskopen på marknaden har analog utgång, även om det finns några med ett digitalt gränssnitt av SPI-typ eller I2C-buss.
- Antal axlar: som i accelerometrar är det något mycket viktigt. De har vanligtvis inte så många axlar tillgängliga som för accelerometrar, men ju mer desto bättre. Numera har några 3-axlar börjat dyka upp, vilket är mycket bra. Men de flesta modeller har 1 eller 2 axlar, vilket borde vara tillräckligt för de flesta projekt. I de 3-axliga bör du konsultera modellinformationen för att veta vilken axel som mäter svängen, eftersom de andra två också kan mäta stigningen och rullen på ett objekt, medan en annan mäter stigningen och giret.
- konsumtion: en annan av de viktiga egenskaperna, eftersom om ditt projekt är beroende av ett batteri måste du välja ett som förbrukar lite energi. I allmänhet är det inte för mycket, den genomsnittliga förbrukningen är vanligtvis runt 100 mikroförstärkare. Vissa mer avancerade kommer att ha en strömavstängningsfunktion när de inte används.
- Extra: vissa kan ha vissa tillbehör, såsom accelerometersensorer, temperaturmätare etc., i samma modul.
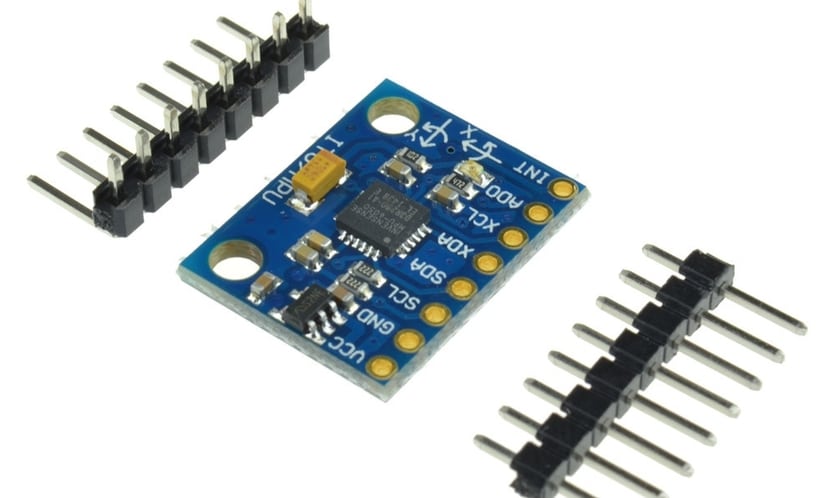
Också, om du köper modulerDe kommer att ha chipet och ett kretskort med några extra som underlättar deras integration med Arduino, till exempel genom att tillhandahålla anslutnings- och strömuttag, etc.
Gyros du kan köpa
Det finns flera gyros du kan köpa som MPU6050 som också inkluderar accelerometer. Vi har redan beskrivit det i en annan artikel, men förutom det finns det andra som du enkelt kan integrera i dina elektroniska projekt tillsammans med Arduino.
- Du kan köpa en gyro som ST Microelectronics LPY503AL. Det är en av de mest populära och Du kan läsa databladet här.
- Du kan också använda tröghetssensor som Inga produkter hittade.,Inga produkter hittade. e Inga produkter hittade., förutom MPU6050 ...
Dess anslutning och integration med Arduino beror på varje modell och tillverkare. Men det är inte komplicerat. Du kan kontrollera deras datablad och pinout att veta hur man hanterar dem. Frågan är att veta hur de arbetar för att veta hur man beräknar vinkelförskjutningen och att din kod i Arduino IDE tolkar den och genererar en åtgärd därefter ...