
La mecatrónica es una disciplina que mezcla mecánica con electrónica, siendo una rama multidisciplicar de la ingeniería que se nutre de la robótica, la electrónica, la informática, telecomunicaciones, control, etc. Para ir más allá de los proyectos DIY electrónicos, y comenzar a experimentar con proyectos mecatrónicos, puedes empezar a integrar dispositivos como los motores o el actuador lineal para tu Arduino.
Eso te abre un nuevo mundo de posibilidades para los makers. De hecho, este actuador lineal resulta de lo más práctico con la capacidad de realizar acciones móviles o ejercer fuerza sobre otros elementos. ¿Quieres conocer más? Te lo contamos…
Tipos de actuadores lineales

Existen varios tipos de actuadores, aunque en este artículo nos centraremos en el que usa un motor eléctrico para impulsar el émbolo. Pero debes saber que puede haberlos también de otros tipos:
- Hidráulicos: emplean algún tipo de fluido para mover el émbolo.Un ejemplo puede ser el de muchas máquinas agrícolas o excavadoras, usando estos pistones y la presión del aceite para mover los brazos articulados, prensas hidráulicas, etc.
- Eléctricos: son actuadores que usan un tornillo sin fin movido por un motor eléctrico para generar el movimiento. También los hay de tipo solenoide (electroimán), que usan campo magnético para mover el pistón o émbolo y un muelle para devolverlo a su posición original cuando no se está ejerciendo ese campo. Un ejemplo práctico puede ser el ejemplo final que expongo en este artículo, o también otros muchos de robótica, aparatos mecánicos comunes, etc.
- Neumáticos: emplean aire como fluido, en vez de un líquido como en el caso de los hidráulicos. Un ejemplo de éstos son los típicos actuadores lineales que hay en los talleres de tecnología de algunos centros educativos.
El objetivo final de este dispositivo es transformar una energía de tipo hidráulico, eléctrico o neumático en un empuje lineal en este caso, ejerciendo así fuerza, empuje, actuando como regulador, accionando algún otro mecanismo, etc.
Sobre el actuador lineal electrónico
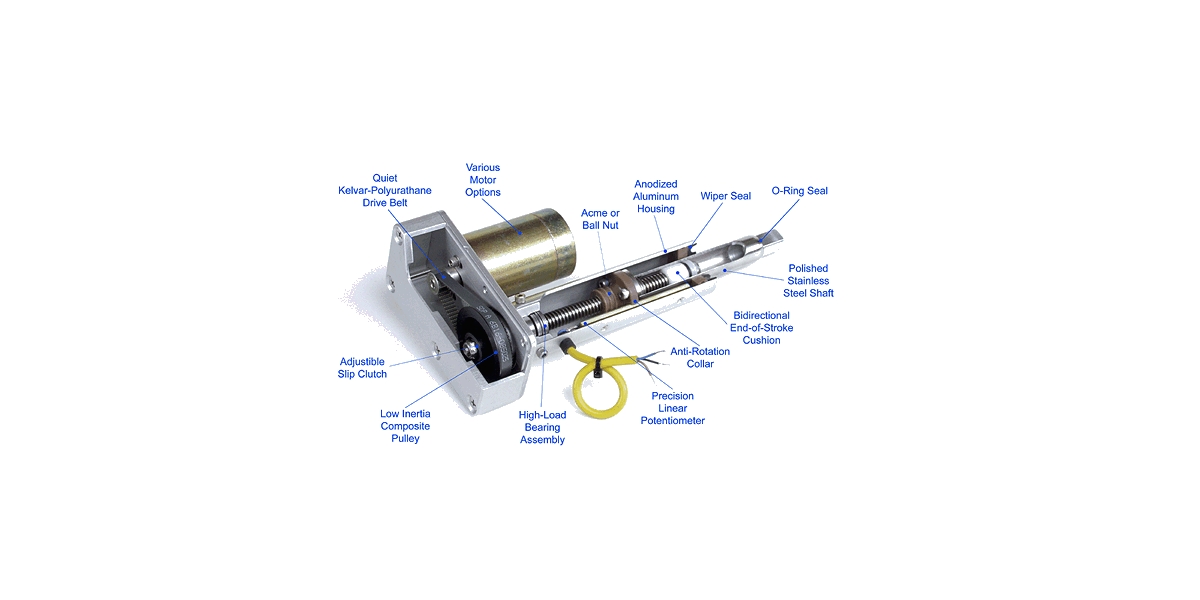
Básicamente un actuador lineal eléctrico no es más que un motor eléctrico, en ocasiones puede ser un NEMA como los ya vistos. Este motor hace girar su eje, y mediante una combinación de engranajes o cadenas dentadas hará girar un tornillo sin fin. Ese tornillo sin fin será el encargado de deslizar en una u otra dirección (según el sentido de giro) un émbolo o vástago.
Ese émbolo será el que sirva como actuador para empujar algo, para tirar de algo, para ejercer una fuerza, etc. Las aplicaciones son bastante amplias. Como ves, es algo bastante sencillo que no guarda demasiados misterios.
Estos actuadores lineales, a diferencia de otros no lineales, tienen la ventaja de poder ejercer grandes fuerzas y desplazamientos considerables (en función del modelo). Pero para Arduino, tienes algunos modelos que pueden llegar desde los 20 a los 150 Kgf (kilogramo fuerza o kilopondio), y desplazamientos de 100 a 180 mm.
Como gran desventaja está su velocidad de desplazamiento, ya que al ejercer esas enormes fuerzas, las ruedas reductoras necesarias para aumentar el par harán que la velocidad de extensión y para retraerse sea más baja. Pueden darse velocidades de 4 a 20 mm/s en los modelos típicos. Eso hace que para completarse todo el proceso lineal pueda ir desde unas decenas de segundos a unos minutos en caso de ser más largos y lentos…
En cuanto a su alimentación, los tienes de varios voltajes o tensiones. Por ejemplo, lo habitual es que sean de 12 o de 24v, aunque puedes encontrar algunos por debajo y por encima de eso. En cuanto a su consumo, pueden ir desde los 2A a los 5A en algunos casos. Como ves, al tratarse de un motor potente, el consumo es elevado… Así que si lo piensas alimentar con baterías, deberás considerar que tengan la capacidad necesaria.
Control del actuador lineal
El actuador lineal eléctrico que puedes encontrar para Arduino podría tener varios tipos de control:
- Con potenciómetro: mediante un potenciómetro permiten seleccionar el posicionamiento del émbolo.
- Con fin de carrera: un final de carrera en cada extremo hará que una vez llega al tope se detenga él solo.
- Sin control: no tienen ninguno de los anteriores sistemas de control.
Pinout
El pinout de un actuador lineal no podría ser más sencillo. Tiene dos cables conductores para alimentar al motor eléctrico que integra, y nada más que eso. Por tanto, cero complicaciones. Lo único que hay que tener en cuenta para extender o retraer el vástago es que hay que invertir el giro del motor (polaridad de la corriente).
Para que eso sea posible puedes usar un controlador H-bridge como el que se usa para los motores de corriente continua. Podrías pensar que te sirve alguno como el L298N, u otros vistos, como el TB6612FNG, etc. Pero lo cierto es que ninguno de ellos tiene potencia suficiente para estos actuadores lineales (si son de grandes dimensiones). Por tanto, el controlador se quemaría.
Por tanto, solo puedes construir tu propio control de velocidad usando transistores como los BJT o los MOSFET, e incluso relés de estado sólido…
¿Dónde comprar un actuador lineal?
El precio del actuador lineal dependerá en gran medida del tamaño, la velocidad, la longitud, y también de la fuerza que pueda llegar a soportar. Por lo general, puedes encontrarlos desde unos 20€ hasta 200€. Y los encontrarás fácilmente en tiendas especializadas de electrónica o en otras online como Amazon. Por ejemplo:
- Sourcingmap actuador con solenoide capaz de ejercer una fuerza de 400g y 4mm
- Justech DC 12V actuador lineal de hasta 72kg y 150 mm de desplazamiento
- No products found.
- Seafront 12V de hasta 300mm y 150 kg de peso soportado (estimado para 50mm)
- No products found.
Muchos de estos productos están protegidos contra polvo y salpicaduras por el certificado IPX54. Y ten en cuenta las recomendaciones del fabricante, los pesos indicados no siempre están soportados para todas las longitudes de extensión, en algunos casos solo se soporta cierto peso límite hasta cierta extensión.
Integración con Arduino
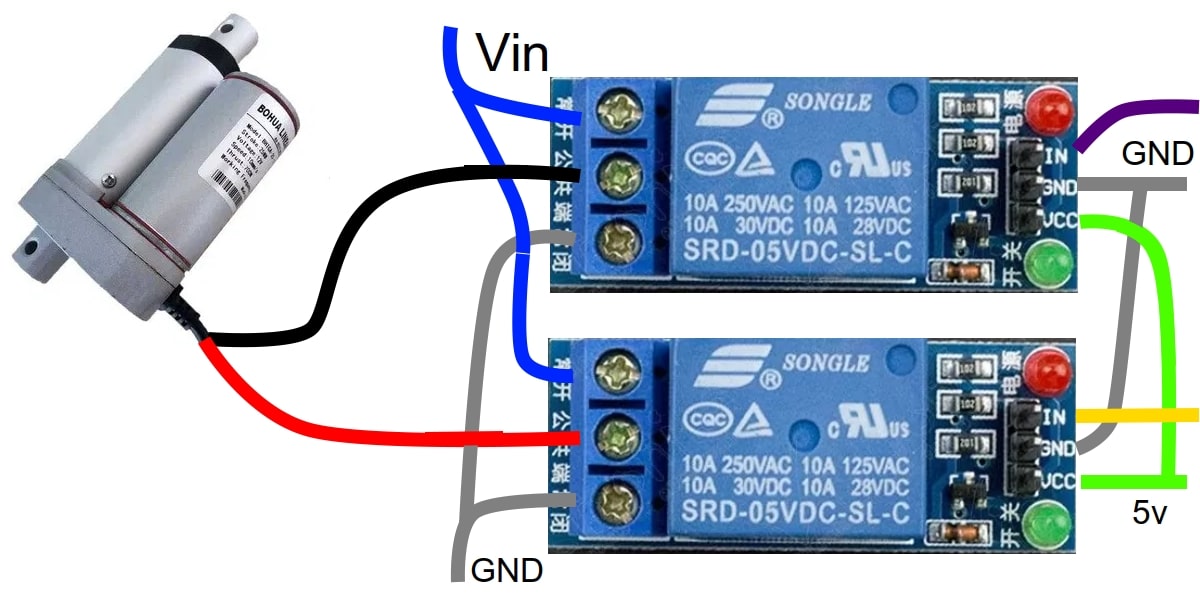
Este tipo de actuadores pueden tener usos prácticos variados si los integras con tu placa Arduino. Para ello, lo primero que debes conocer es la forma en la que se puede realizar el esquema de conexión con tu placa. Como podrás comprobar, no es nada complicado, por lo que no presenta demasiada complicación.
Como puedes ver en el esquema anterior que he dibujado, he usado dos relés y un actuador lineal. Las líneas de colores que ves representan lo siguiente:
- Rojo y negro: son los cables del actuador lineal que irán a cada uno de los relés usados.
- Gris: tienes conectado a tierra o GND en cada uno de los relés como puedes ver.
- Azul: va a la alimentación Vin para el relé, en en este caso será de entre 5v y 12v.
- Verde: las líneas Vcc del módulo van conectadas a 5v de tu placa Arduino.
- Gris: también de tierra, conectados desde el módulo al GND de Arduino.
- Morado y naranja: son las líneas de control que irán a alguno de los pines de Arduino para controlar el giro. Por ejemplo, puede ir a D8 y D9.
En cuanto al ejemplo de código fuente para tu Arduino IDE, el sketch para el control básico quedaría del siguiente modo:
//configurar las salidas digitales
const int rele1 = 8;
const int rele2 = 9;
void setup()
{
pinMode(rele1, OUTPUT);
pinMode(rele2, OUTPUT);
//Poner los relés a bajo
digitalWrite(rele1, LOW);
digitalWrite(rele2, LOW);
}
void loop()
{
extendActuator();
delay(2000);
retractActuator();
delay(2000);
stopActuator();
delay(2000);
}
//Activar uno de los relés para extender el actuador
void extendActuator()
{
digitalWrite(rele2, LOW);
delay(250);
digitalWrite(rele1, HIGH);
}
//Lo inverso a lo anterior para retraer el émbolo
void retractActuator()
{
digitalWrite(rele1, LOW);
delay(250);
digitalWrite(rele2, HIGH);
}
//Poner ambos releś apagados parar el actuador
void stopActuator()
{
digitalWrite(rele1, LOW);
digitalWrite(rele2, LOW);
}
Puedes modificar el código para poder controlar y posicionar el émbolo en posiciones concretas si lo deseas, o agregar más elementos…